แผงวงจรขับดีซีมอเตอร์ EB-TK200 พิกัด 12-36Vdc 200A
รุ่น 200A Mosfet IRFS7530 Spec 240Ax4

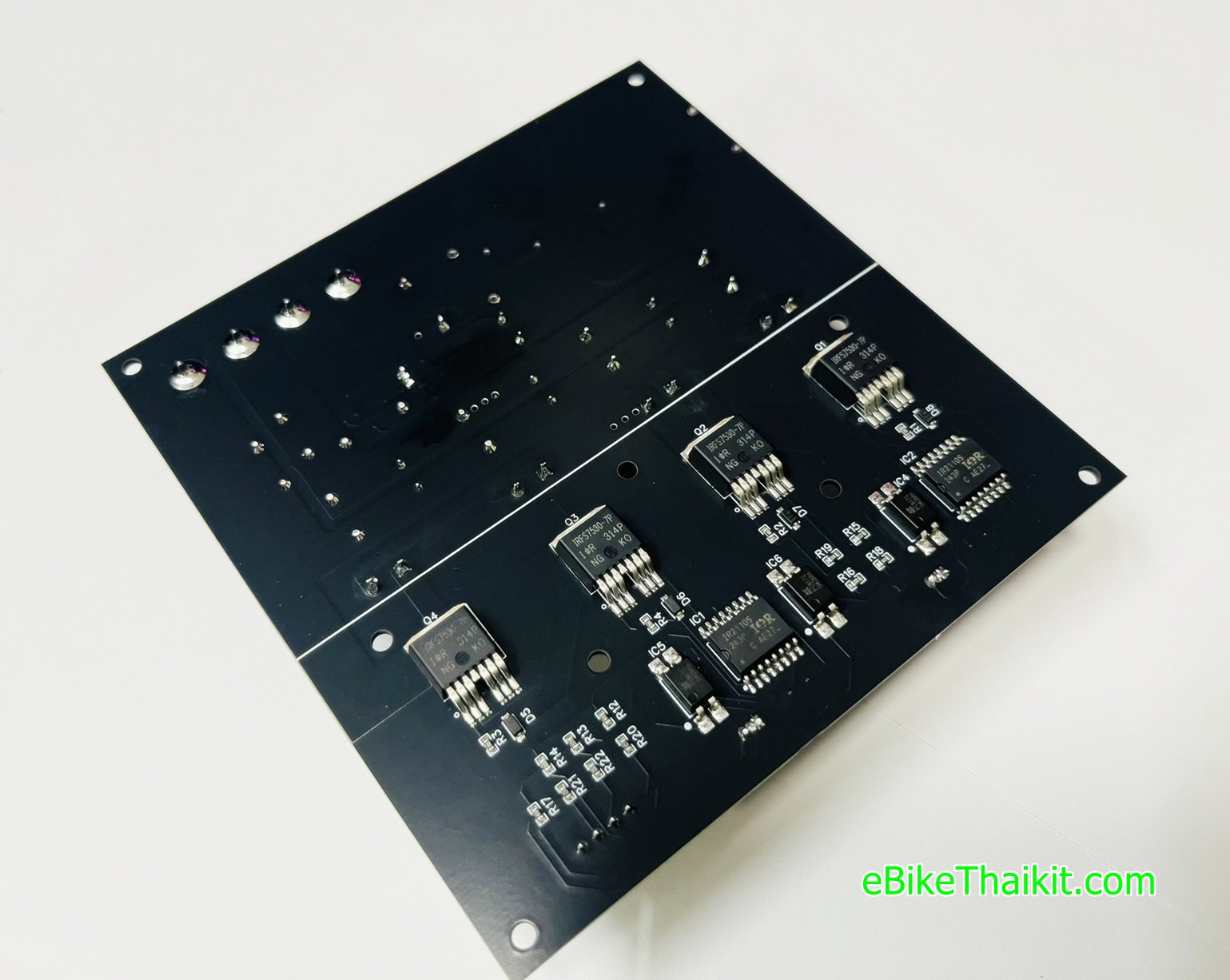
ภาคขับกระแสหลักใช้ Mosfet IRFS7530 Spec 240A เพียงพอสำหรับใช้ในงาน
กระแส 100A (MOS 100%) เช่นรถเพื่อการเกษตร งานวิจัยพัฒนา DIY หรือในงาน
อุตสาหกรรม เป็นต้น คุณสมบัติสำคัญคือการหาทางป้องกันแรงดันเกิน (Transient
Voltage Protection) หรือ Back EMF
แนวทางในการออกแบบและการทำงานของวงจร
อันดับแรกเราต้องทราบว่าเราจะไปใช้งานสเปคเท่าไร แรงดัน และ กระแสใช้งานที่
ต้องการเท่าไร จากนั้นจึงมาเลือก Power Mosfet ที่มีคุณสมบัติตามต้องการได้
ตัวอย่างวงจรที่ผมออกแบบนี้ เบื้องต้นสำหรับใช้งานที่แรงดัน 12-36V กระแสใช้งาน
จริงๆไม่เกิน 100A ก็ถือว่าสูงมาก ซึ่งปกติใช้งานจริงๆกระแสมอเตอร์อยู่แค่ระดับ 30-40A
ก็เพียงพอ แต่ผมเลือกใช้ IRFS7530 เพราะตามสเปคระบุ แรงดัน 60V กระแส 240A
ถือว่าสูงมาก แต่การใช้งานจริงเผื่อไว้ 100A นั่นก็ถือว่ามากเพียงพอใช้งานทั่วไปแล้ว
ปกติถ้า เลือกแรงดันสูงกระแสก็ต่ำ เลือกแรงดันต่ำกระแสก็สูง ได้อย่างเสียอย่าง
เลือกที่เหมาะสมกับการใช้งานของเราก็ OK

คลิบตัวอย่างการเลือก Mosfet Spec
ถัดมาก็ต้องมาออกแบบภาค Gate Drive ว่าจะใช้วงจรไหนซึ่งมีมากมายแต่จากที่ศึกษา
มาง่ายสุดก็จะเป็นพวก IC Gate Driveสำเร็จรูปอย่าง IC TLP250 หรือ IR2110 ก็ตามซึ่ง
แล้วแต่การเลือกใช้งานในการออกแบบวงจรต่อไป


ส่วนที่ผมเลือกใช้คือ IR2110 เนื่องจากการต่อใช้งาน Drive Gate Power Mosfet แบบ
H-Bridge ทำได้สะดวก แต่ข้อเสียยุ่งยากหน่อยคือ เรื่องไฟเลี้ยง IC แยกเป็น 2 ส่วนคือ
ไฟเลี่ยงในส่วนขับ Gate และไฟเลี้ยงในส่วนของ Input หากออกแบบให้ใช้ร่วมกันได้
ก็ไม่ยากทำได้ และ สำคัญอีกจุดคือ การเลือก Bootstrap Capacitor (Cboot) ค่าที่
เหมาะสม กับย่านความถี่ PWM ที่ใช้งานเนื่องจาก Power Mosfet มีค่าการประจุชาจ์ทที่
ขา Gate สามารถหาดูได้ใน DataSheet เรียกว่าค่า Qg (Total Gate Charge) แต่ถ้าง่ายๆ
เราก็เลือกใช้ค่าสูงๆไว้เพื่อเป็นการเพียงพอในการชาจ์ทประจุ 2.2-4.7uF (X7R ceramic)
อีกส่วนคือหากต้องการแยก Input Isolate ต้องจัดภาค Input โดยใช้ Opto isolator
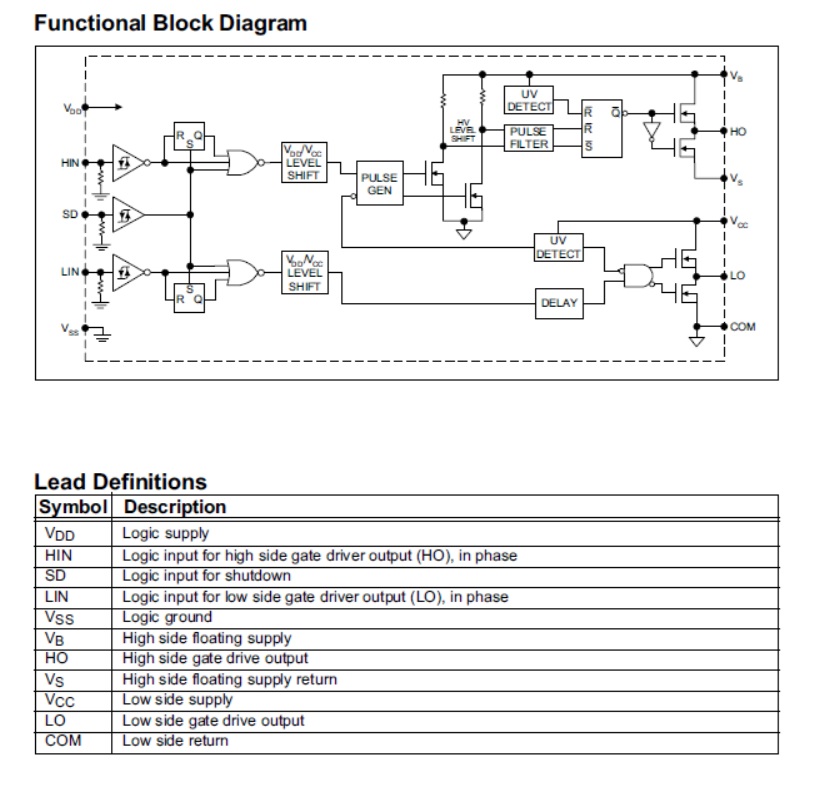
module เข้ามาช่วยเสริม แต่ TLP250 มี Opto isolator ในตัวเองด้านล่างนี้เป็นข้อมูล
Block Diagram ของ IC IR2110
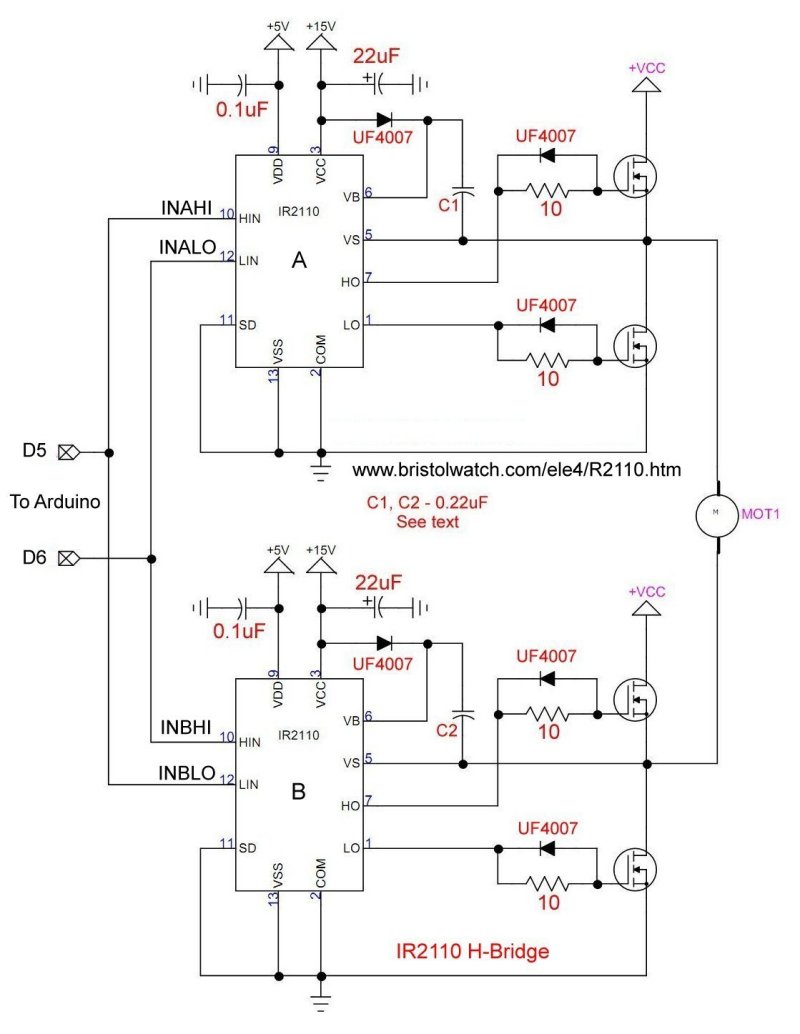
ตัวอย่างวงจร Drive Gate Power Mosfet ใช้ IR2110
ข้อมูลสำคัญอีกอย่างและเป็นเทคนิคสำคัญ ในการออกแบบวงจร DCMotor Drive คือ
เรื่องการป้องกัน BACK EMF
วงจรไม่ว่าจะออกแบบมาเลือกใช้ Power Mosfet เทพแค่ไหนหากไม่คำนึงถึงแรงดันตีกลับ ซึ่งเป็น
ศัตรูตัวร้ายในวงจร Driver Motor จะสร้างความเสียหาย ต่อวงจรได้ในแบบชั่วขณะ หรือ ที่เราเรียกว่า
Back EMF ขณะมอเตอร์เปลี่ยนแปลง สถานะการทำงาน จากมีโหลด เป็นไม่ีมีโหลด หรือ ช่วงกลับทางหมุน
ความสัมพันธ์และข้อมูล Back EMF สามารถศึกษาดูได้จากข้อมูลประกอบและคลิบด้านล่างนี้เพิ่มเติมเพื่อ
ความเข้าใจ มากขึ้น
 |
 |
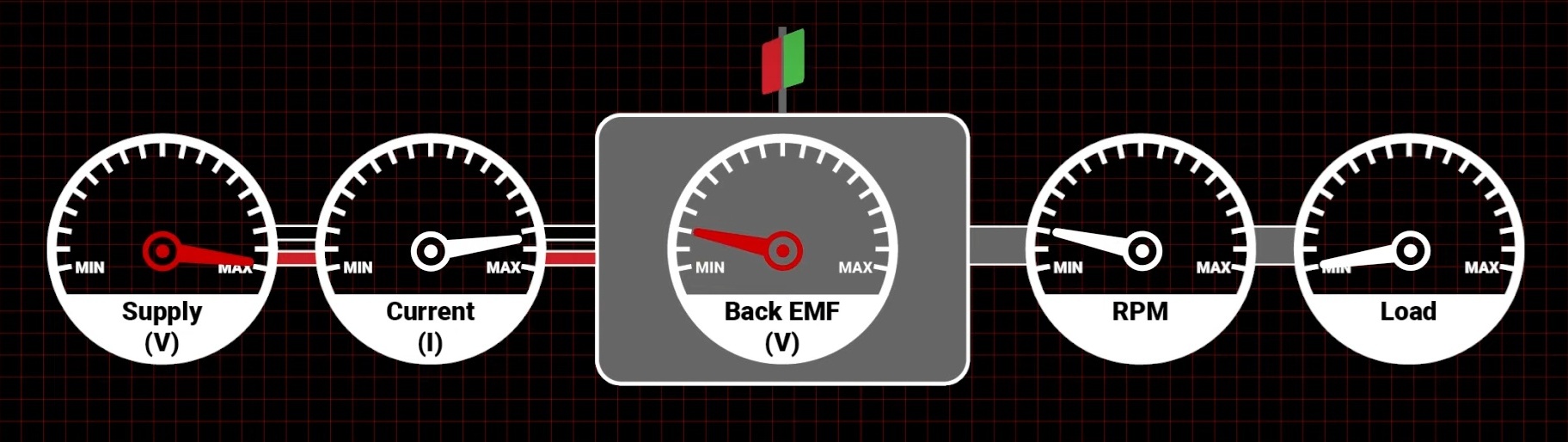
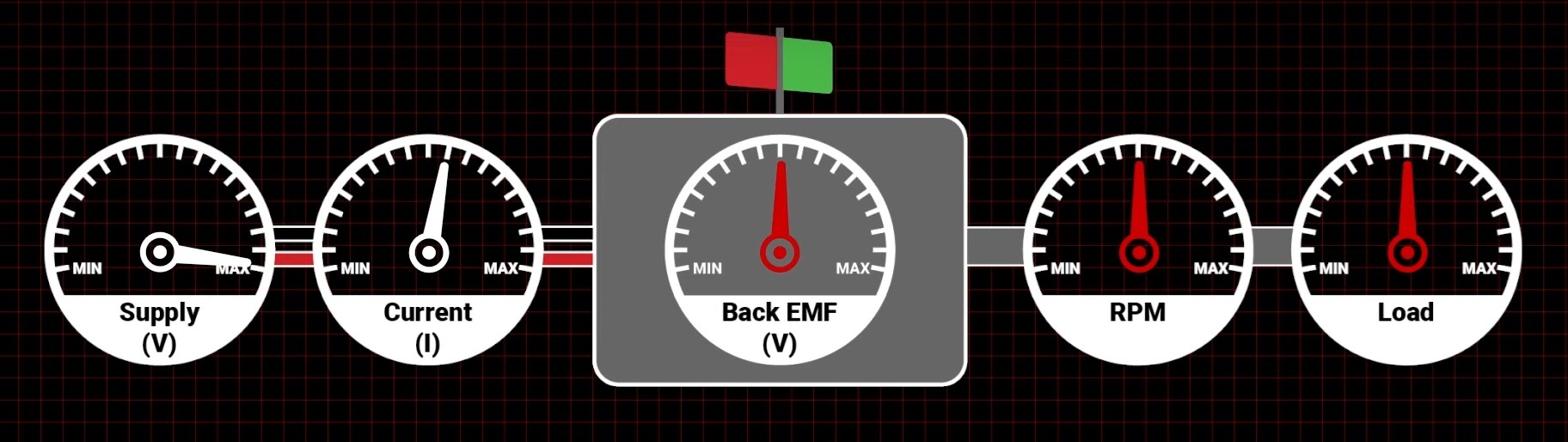
| มอเตอร์เริ่มหมุนแบบไม่มีโหลด BackEMF เริ่มมา |
มอเตอร์หมุนเร็วรอบสูงขึ้น BackEMF สูงขึ้น |
 |
 |
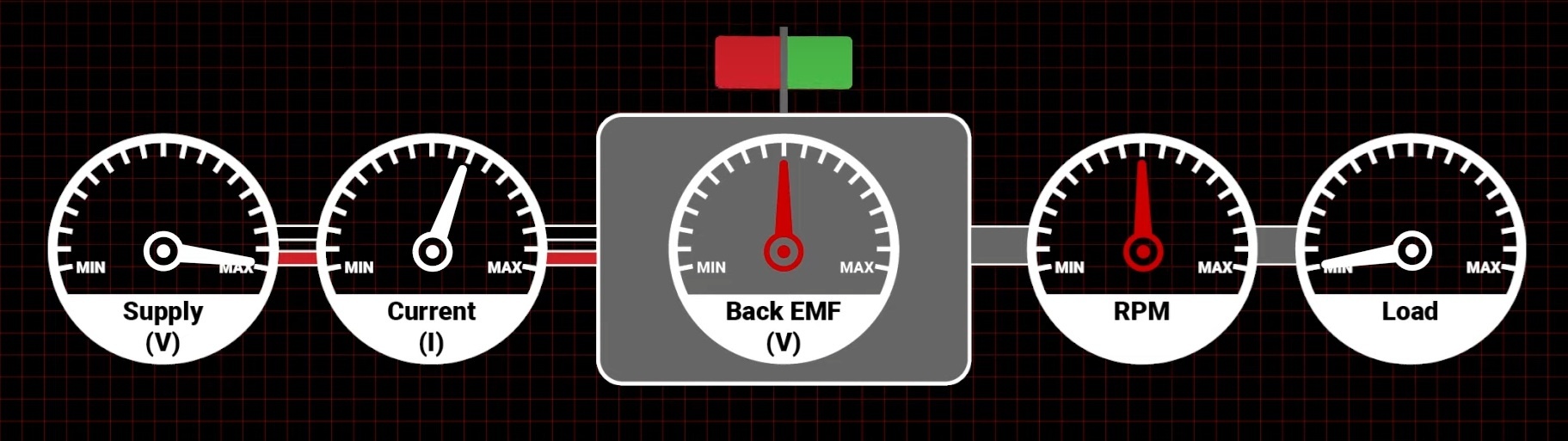
| มอเตอร์หมุนเร็วขึ้น BackEMF สูงขึ้นๆ |
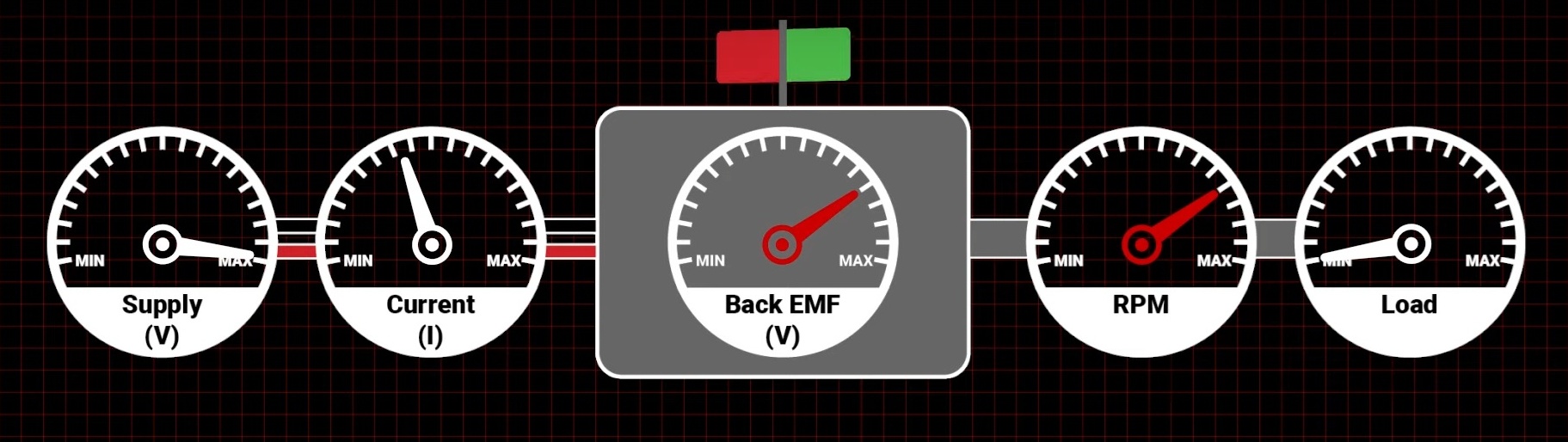
ที่ความเร็วรอบสูงสุด แบบไม่มีโหลด BackEMF สูงสุด |
 |
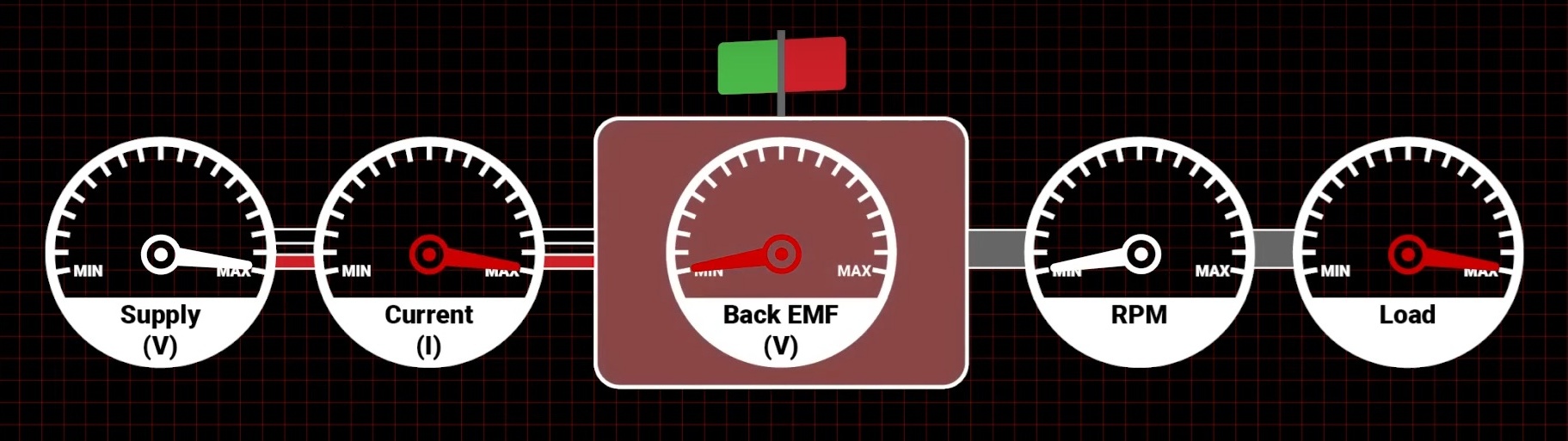 |
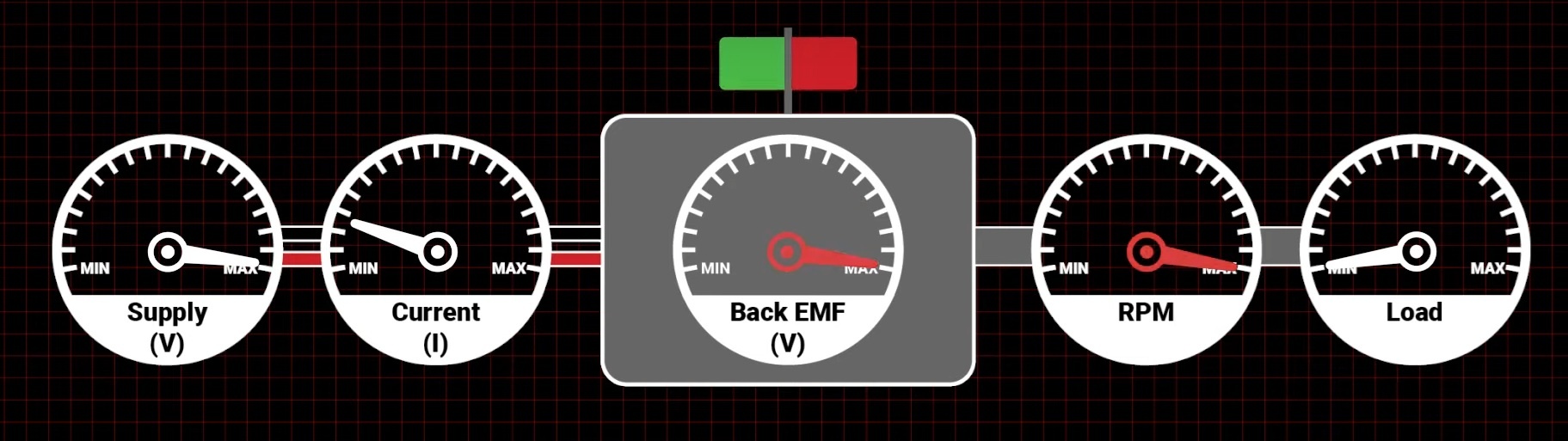
| เริ่มมีโหลด รอบตกลง กระแสสูงขึ้น BackEMF ลดลง |
สภาวะ MaxLoad ถ้ารอบเป็นศูนย์ กระแสสูงไม่ดี เสี่ยงไหม้ |
*** สรุปได้ว่า BackEMF หรือที่เราเรียกว่าแรงดันย้อนกลับนี้ มีโอกาสจะทำความเสียหายต่อ
Driver Motor Circuit ได้แบบทันทีทันใดนั้นคือตอนที่ "มอเตอร์ Run ตัวเปล่าไม่มีโหลดแบบรอบสูง
หรือช่วงจังหวะที่มีโหลดอยู่แล้วปลด โหลดออกทันทีทันใด" ก็จะทำให้เป็นสภาวะที่เกิด BackEMF
สูงสุดย้อนตีกลับวงจรเสียหายได้ง่าย กลับกันขณะมีโหลดนั้นจะพิจารณาที่ กระแสใช้งาน และ เรื่อง
การระบายความร้อน ให้ทันเป็นหลักซึ่งหากควบคุมได้ไม่เกินสเปคอุปกรณ์ก็ไม่มี ปัญหานั่นเอง
เครดิต ----> https://www.digikey.co.th/en/articles/controlling-sensorless-bldc-motors-via-back-emf
คลิบศึกษา BackEMF เกิดขึ้นได้อย่างไร และแนวทางออกแบบป้องกัน
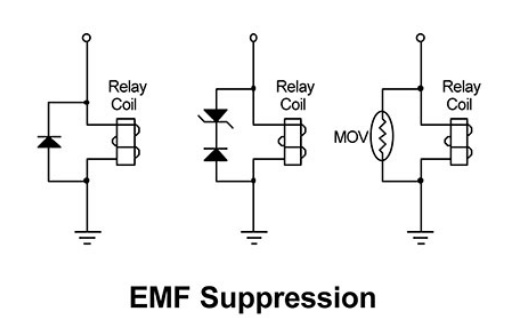
จากคลิบสามารถสรุปเป็นภาษาบ้านๆ ที่เข้าใจง่ายคือ อุปกรณ์ที่เป็นขดลวด เมื่อมีกระแสไหลผ่าน
ขั้วนึงจะเป็นบวก ขัวนึงเป็นลบ พอเราหยุดจ่ายไฟให้ อุปกรณ์ขดลวด ไม่ว่าจะเป็น L Coil Motor Relay
เหล่านี้ทั้งหลาย มันจะคายพลังงานออกมา ตามสูตรเขาบอกมาว่า V = L*dI/dt และจะมีแรงดัน
กลับกันกับตอนแรก ฉะนั้นแรงดันนี้มันจะไปเสริมบวกรวมกับแรงดันแหล่งจ่าย แน่นอนจะทำให้เกิด
แรงดันตกคร่อมอุปกรณ์สวิทช์ หรือ Vds Mosfet นั่นเอง ซึ่งหากสูงเกินสเปคที่ออกแบบไว้ ไหม้ตุย
อย่างเดียว จึงต้องออกแบบหาทางป้องกันไว้ด้วย ดังตัวอย่างด้านล่างนี้เป็นต้น
ข้อมูลคุณสมบัติทางเทคนิค
- แผงวงจรขับดีซีมอเตอร์ EB-TK200 พิกัด 12-36Vdc 200A Peak พร้อมวงจรป้องกันแรงดันเกิน
เป็นบอร์ดขับดีซีมอเตอร์แบบเฮชบริดจ์ (สามารถควบคุมมอเตอร์หมุนกลับทางได้)
- รองรับแรงดันทางเอาต์พุต (แรงดันไฟเลี้ยงมอเตอร์) : 12-36Vdc
- รองรับแรงดันไฟอินพุต 3-5V/8mA TTL Level
- กระแสทางด้านเอาต์พุต : กระแสพีคสูงสุด 200A
- มีวงจรป้องกันแรงดันเกิน (Transient Voltage Protection)
- มีออปโต้คัปเปลอร์ สำหรับแยกกราวด์ทางด้านอินพุต ออกจากทางด้านเอาต์พุต
- เหมาะสำหรับนำไปประยุกต์ ใช้งานในการควบคุม ระบบขับเคลื่อนต่างๆ อาทิเช่น รถตัดหญ้าบังคับ ไฟฟ้า
จุดต่อทางด้าน Input
จุดต่อควบคุมทางด้านอินพุต (3-5V/8mA TTL Level มีออปโต้สำหรับแยกกราวด์ทางด้านอินพุตกับเอาต์พุต)
GND : จุดต่อกราวด์ทางด้านอินพุต
EN/PWM : ควบคุม ON/OFF หรือสามารถต่อสัญญาณ PWM เพื่อใช้ในการควบคุมความเร็วของมอเตอร์ได้ (Active High: 0=off, 1=On)
IN1 : ควบคุมการหมุนทางซ้าย
IN2 : ควบคุมการหมุนทางขวา
จุดต่อทางด้าน Output
+VS : จุดต่อไฟเลี้ยงมอเตอร์ (รองรับแรงดันสูงถึง 12-36Vdc)
M+ : จุดต่อมอเตอร์ด้านบวก
M- : จุดต่อมอเตอร์ด้านลบ
GND: จุดต่อกราวด์