เปิดเว็บเมื่อ : 2007-03-05
จำนวนสมาชิก : 580 คน
ปรับปรุงเมื่อ : 2025-04-30
จำนวนครั้งที่ชม : 14,928,804 ครั้ง
Online : 72 คน
จำนวนสินค้า : 350 รายการ
จำนวนสมาชิก : 580 คน
ปรับปรุงเมื่อ : 2025-04-30
จำนวนครั้งที่ชม : 14,928,804 ครั้ง
Online : 72 คน
จำนวนสินค้า : 350 รายการ










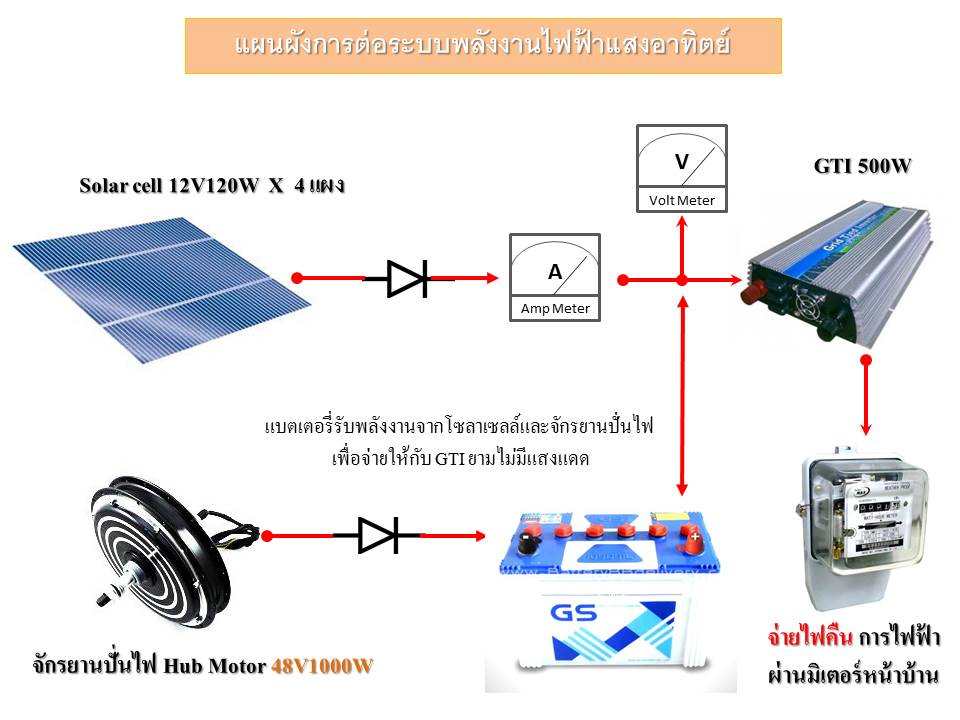















 ปกติบ้านหลังนี้ ใช้ไฟฟ้าเวลากลางวัน 4 หน่วย และกลางคืน 5 หน่วย เฉลี่ยใน 1 วัน ใช้ไฟฟ้า 9 หน่วย โซลาร์เซลล์ ในระบบคือ 285W จำนวน 8 แผง และ 345W จำนวน 3 แผง (เป็นแผงเสริมระบบ ไม่ได้รับแดดเต็มที่ตลอดวัน) ฉะนั้นกำลังการผลิตได้ ใน 1 วันจึงประมาณ 285W X 8 X 5 = 11,400W ส่วนแผงเสริมจะได้ประมาณ 345W X 3 X 4 = 4,140W รวมๆ แล้ว 15,540W หรือ 15.5 หน่วย แต่ระบบ Hybridge ที่ต้องใช้แบตเตอรี่และมีการแปลงไฟจากแบตเป็น ไฟบ้านจะมี Loss ในระบบในรูปของความร้อน และ ประสิทธิภาพแบตจึงคิดที่ 60% ของพลังงานที่ผลิตได้ จึงเหลือใช้พลังงานได้จริงๆ ประมาณ 9 หน่วยต่อวัน กลางวันใช้ไป 4 หน่วย กลางคืนได้ 5 หน่วย พอดี โดยประมาณ
ปกติบ้านหลังนี้ ใช้ไฟฟ้าเวลากลางวัน 4 หน่วย และกลางคืน 5 หน่วย เฉลี่ยใน 1 วัน ใช้ไฟฟ้า 9 หน่วย โซลาร์เซลล์ ในระบบคือ 285W จำนวน 8 แผง และ 345W จำนวน 3 แผง (เป็นแผงเสริมระบบ ไม่ได้รับแดดเต็มที่ตลอดวัน) ฉะนั้นกำลังการผลิตได้ ใน 1 วันจึงประมาณ 285W X 8 X 5 = 11,400W ส่วนแผงเสริมจะได้ประมาณ 345W X 3 X 4 = 4,140W รวมๆ แล้ว 15,540W หรือ 15.5 หน่วย แต่ระบบ Hybridge ที่ต้องใช้แบตเตอรี่และมีการแปลงไฟจากแบตเป็น ไฟบ้านจะมี Loss ในระบบในรูปของความร้อน และ ประสิทธิภาพแบตจึงคิดที่ 60% ของพลังงานที่ผลิตได้ จึงเหลือใช้พลังงานได้จริงๆ ประมาณ 9 หน่วยต่อวัน กลางวันใช้ไป 4 หน่วย กลางคืนได้ 5 หน่วย พอดี โดยประมาณ












































































.jpg)
.jpg)

.jpg)


.jpg)
.jpg)
.jpg)