เปิดเว็บเมื่อ : 2007-03-05 จำนวนสมาชิก : 580 คน
ปรับปรุงเมื่อ : 2025-05-07 จำนวนครั้งที่ชม : 14,964,936 ครั้ง Online : 30 คนจำนวนสินค้า : 352 รายการ
ID ระบบ : @440aburo
ร้านค้า
มอเตอร์ไซด์ไฟฟ้า จดทะเบียน
รวมบทความและผลงาน
จักรยานไฟฟ้า รถไฟฟ้า พื้นฐานเพื่อการศึกษา ออกแบบและใช้งาน
คุยกันก่อน บทความนี้จัดสร้างขึ้นเพื่อเป็นแนวทางสำหรับผู้ที่สนใจอยากจะสร้างหรือประดิษฐ์ จักรยานไฟฟ้า ในยุคนั้นปี 2004 อุปกรณ์บางอย่างหายาก ไม่แพร่หลายเช่นปัจจุบัน เพื่อไว้ใช้งานเดินทางระยะสั้นทดแทน การใช้น้ำมันที่แพงขึ้นทุกวันและกำลังจะหมดไป และมีการพัฒนาการค้นคว้าทดลอง เกี่ยวกับรถไฟฟ้าและพลังงานทดแทนเรื่ือยมาจน ณ ปัจจับัน ข้อมูลนี้ผมได้เขียนขึ้นมาจากความรู้และประสบการณ์เข้าใจส่วนตัว คำพูดและข้อมูลบางอย่างอาจจะไม่ตรงตามหลักวิชาการ 100% ซึ่งอาจจะพอเป็นแนวทางไม่มากก็น้อย และพอจะเป็นแนวทางและกำลังใจให้กับผู้สนใจได้บ้าง.... มาดูรายละเอียดการทำงานของอุปกรณ์หลัก ๆของจักรยานไฟฟ้ากัน !! จักรยานไฟฟ้าไม่ใช่เรื่องยากอีกต่อไป ผู้ที่สนใจจะลองสร้างหรือประกอบขึ้นใช้งานเอง เพียงแค่มีความรู้ทางอิเล็กทรอนิกส์บ้าง ก็สามารถสร้างได้แล้ว หรืออาจจะไม่มีความรู้ทางนี้เลยก็สามารถสร้างได้ โดยใช้ชุดประกอบสำเร็จหรือชุด Kit นั่นเอง กล่าวคือจักรยานไฟฟ้ามีส่วนหลักๆ ในการทำงานอยู่ 3 ส่วน คือ มอเตอร์ , กล่องควบคุม และ คันเร่ง ส่วนแบตเตอรี่นั้น โดยทั่วไปที่ใช้งานกัน ก็มีแบบแบตเตอรี่แห้งแบบตะกั่วกรด (SLA) แบบลิเทียมลิโพลิเมอร์ หรือแบตขั้นเทพอย่างพวก Lithium Iron Phosphate (LiFePO4 ) หรือ NMC Lithium Nickel Manganese Cobalt Oxide (LiNiMnCoO2 ) ก็ตาม ซึ่งผู้อ่านก็คงรู้จักกันดีอยู่แล้ว ฉะนั้นแล้วหากจะหาจักยานไฟฟ้าไว้ใช้งานซักคันก็ให้คำนึงถึง อ่ะไหล่ต่างๆ สำคัญๆ เหล่านี้ว่าหาซื้อง่ายหรือมีรองรับไหม เผื่อไว้โอกาสที่จะต้องซ่อมบำรุง..
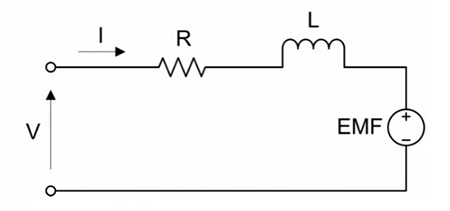
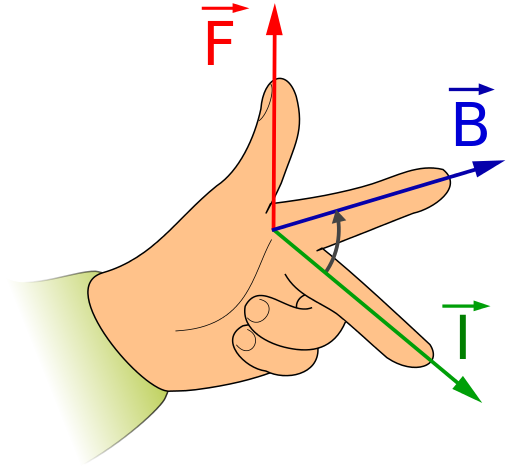
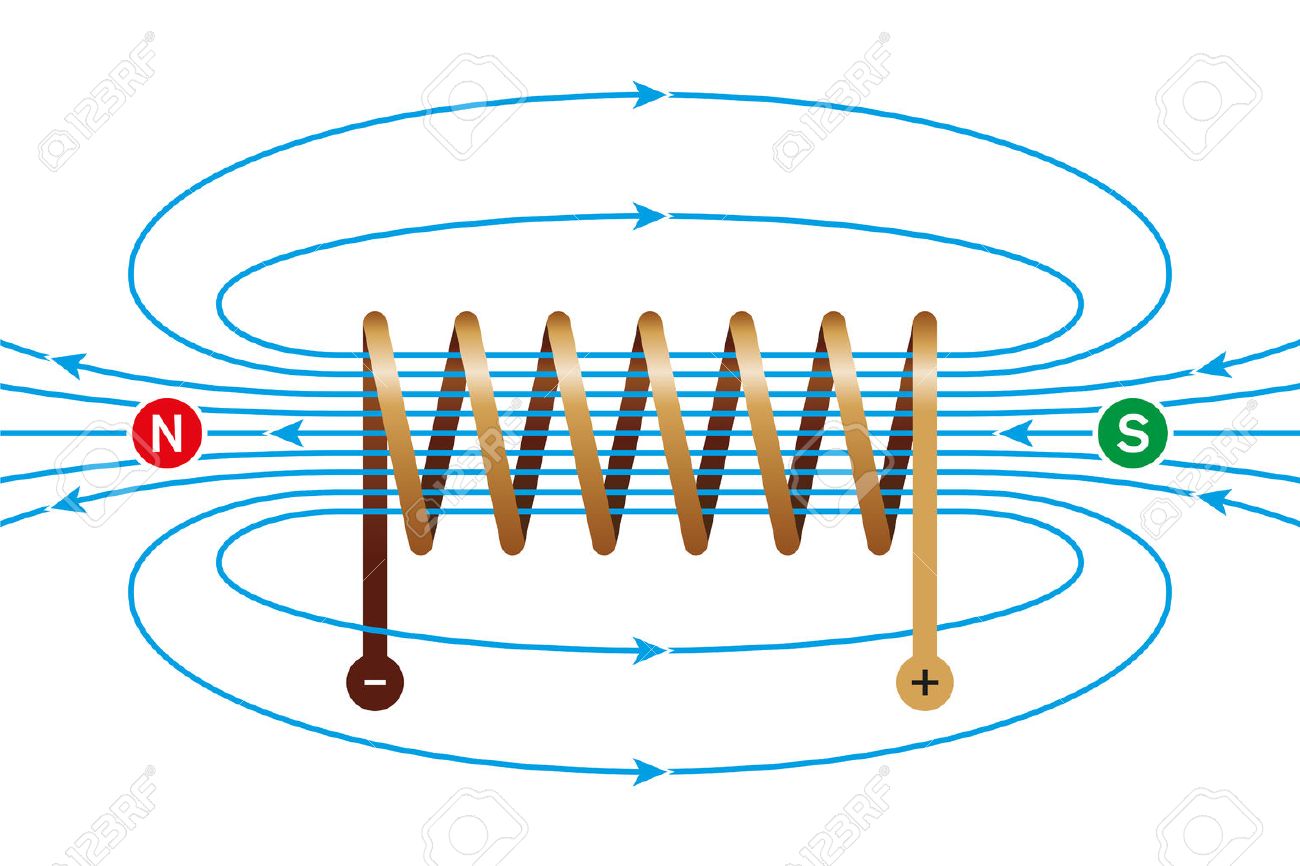
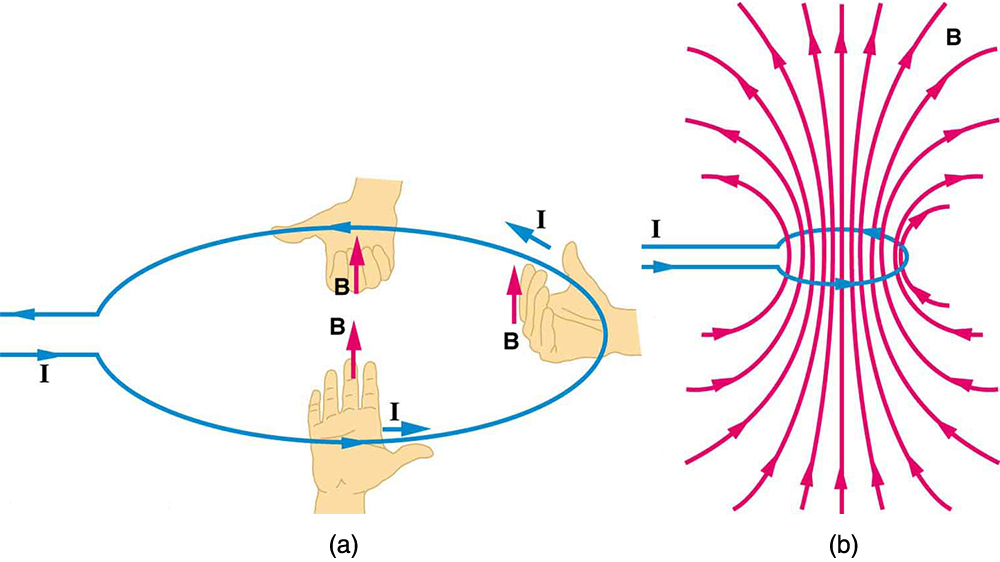
1. มอเตอร์ : มอเตอร์ที่นิยมสร้างรถไฟฟ้ามี 2 แบบ หลักๆ คือ แบบมีแปรงถ่าน (ฺBrush DCMotor) และ แบบไม่มีแปรงถ่าน (ฺBrushless DCMotor) วงจรสมมูลย์พื้นฐานของมอเตอร์ เพื่อง่ายต่อการเข้าใจโครงสร้างทางไฟฟ้า เพื่อคิดคำนวณทางไฟฟ้า จะเป็นลักษณะ ตามรูปด้านล่างนี้ V = I*R + L (dI/dt) + EMF V = applied voltage , I = current , R = resistance , L = inductance The back-EMF (electromotive force) = ke * ω ω = angular velocity of the motor T = k T * I T = torque , k T = torque constant, inherent to the motor) จากจุดนี้จะเห็นว่า แรงดันที่ป้อนเข้าไป มีผลต่อเรื่อง ความเร็วรอบ และ กระแสมีผลในเรื่อง แรงบิด แต่พื้นฐานทางไฟฟ้า ที่เราต้อ งรู้ในการทำงานของมอเตอร์คือ กระแสไฟฟ้า และ สนามแม่เหล็ก กล่าวคือ เมื่อกระแสไฟฟ้า วิ่งผ่านตัวนำ จะเกิดสนามแม่เหล็ก ขึ้นรอบๆ ตัวนำ ตาม ทษฎีของกฏมือขวา และ ทษฎีของกฏมือซ้าย เมื่อมีกระแสไหลผ่านตัวนำ ตามกฏมือขวา ก็จะเกิดสนามแม่เหล็กและมีทิศทาง วิ่งเข้า วิ่งออก ตาม ลูกศร ซึ่ง ทิศทางที่วิ่งออก คือขั้วเหนือ N ทิศทางที่วิ่งเข้า คือขั้วใต้ S และธรรมชาติของ สนามแม่เหล็ก จะวิ่งจากขั้ว เหนือ ไป ใต้ เสมอ ขั้วเหมือนกัน ผลักกัน ต่างกันดูุดกัน ด้วยพื้นฐานของหลักการนี้ จึงเป็นพื้นฐานการทำงาน ของมอเตอร์นั่นเอง ที่นำไฟฟ้า มาแปรเปลี่ยนเป็น สนามแม่เหล็ก ให้เกิดแรงผลัก ดูด กัน ตามกฏมือซ้าย จึง เกิดงาน ทางกล เป็นมอเตอร์ หมุนๆ ที่เรา เห็น เช่นทุกวันนี้ นั่นเอง... เครดิตข้อมูล : MRITS ECE BLOG
คลิบตัวอย่าง การทำงานของ DCMotor ซึ่งเป็นพื้นฐาน การทำงานของทั้ง DCMotor แบบมีแปรงถ่าน และ ไม่มีแปลงถ่าน ที่อาศัยหลักการ ผลัก ดูด ดัน ของ สนามแม่เหล็ก และ สิ่งที่มักมองข้ามกันคือ Back EMF VIDEO VIDEO
1.1 Brush DC Motor มีแปรงถ่าน มอเตอร์ลักษณะนี้ทุกคนรู้จักกันดีอยู่แล้ว กล่าวคือเป็นมอเตอร์ที่หมุนได้โดยใช้ขดลวดเพื่อสร้างสนามแม่เหล็ก มาผลักกับแม่เหล็กถาวรภายในตัวมอเตอร์เอง โดยการจ่ายไฟจากแหล่งจ่ายผ่าน "แปรง ถ่าน" มายังคอมมิวเตอร์ซึ่งเป็นหน้าสัมผัส นำไฟฟ้าไปสู่ขดลวดอาร์มาเจอร์ ซึ่งพันอยู่บนแกนเพลาของมอเตอร์เป็นช่อง Slot มอเตอร์แบบนี้ จะมีสายใช้งานหลัก 2 เส้น คือ บวก และ ลบ หากต้องการให้หมุนกลับทางเพียงแค่ สลับขั้วมอเตอร์ และมอเตอร์แบบนี้ ก็มีทั้งแบบดุมล้อ และ แบบแกนหมุน และก็มี่ทั้งแบบมีเกียร์ และ ไม่มีเกียร์ ภายในเช่นกัน
โครงสร้างและส่วนประกอบหลักของมอเตอร์เกียร์ แบบมีแปรงถ่าน (DCMotor 24V250W)
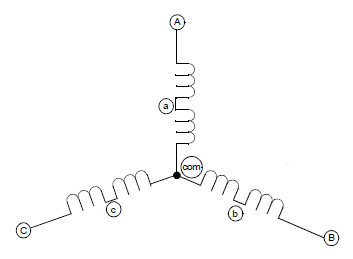
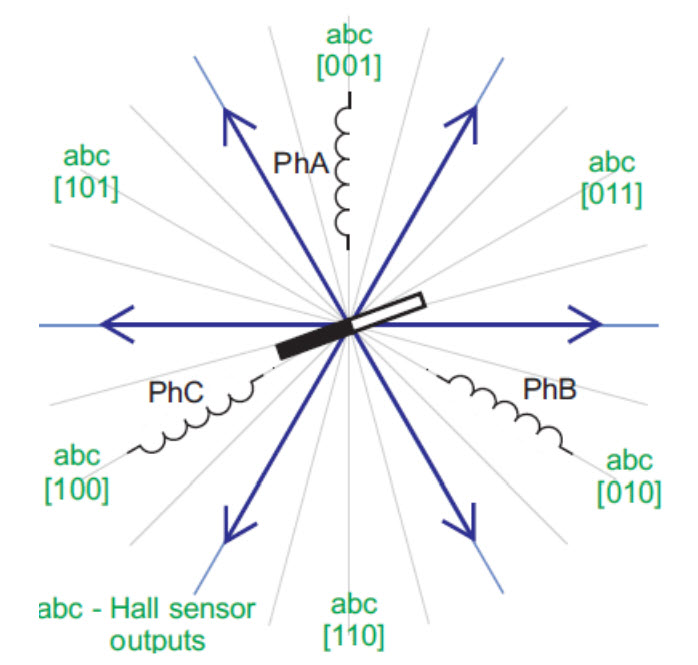
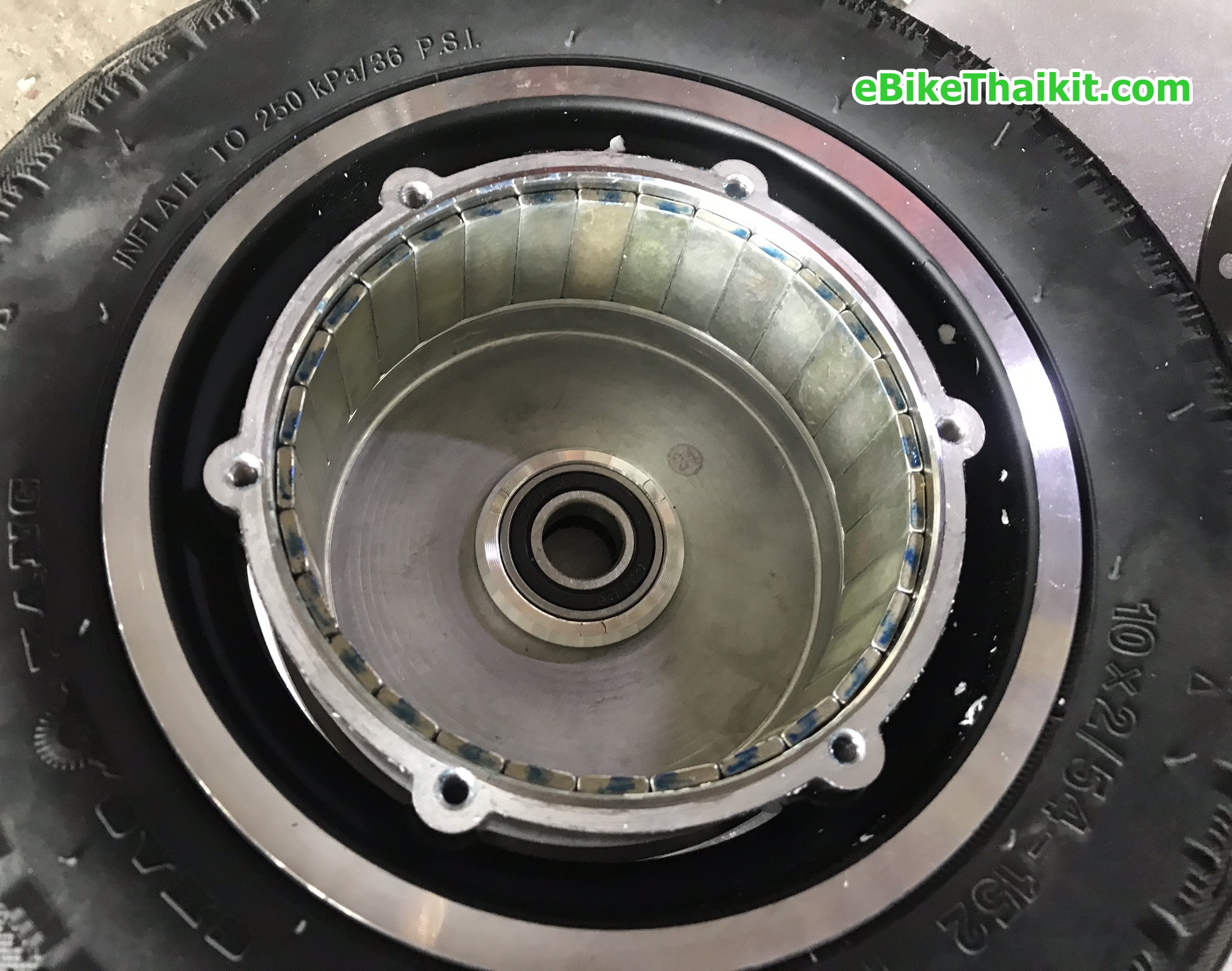
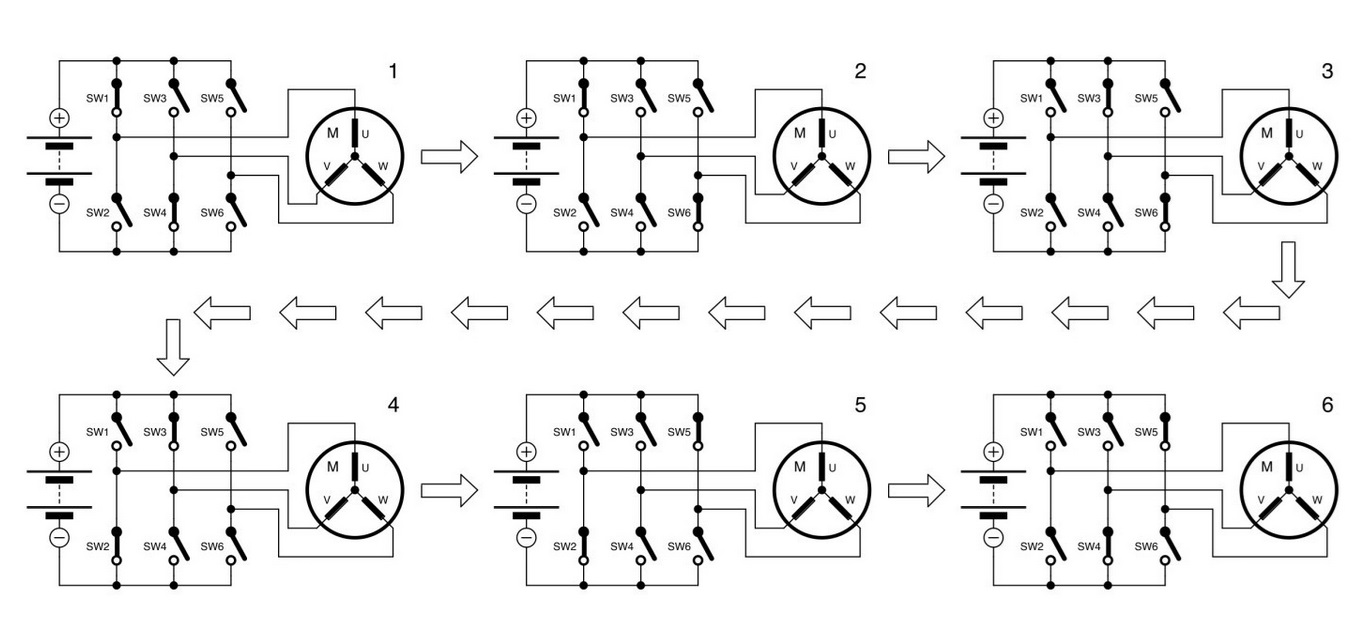
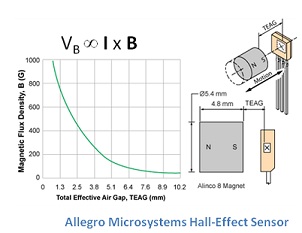
1.2 BLDC Motor (Brushless DC Motor) ซึ่งจะไม่มีแปรงถ่าน มอเตอร์แบบนี้ ภายในจะมี ขดลวด ต่อแบบ STAR แบบ 3 เฟส ถามว่าทำไมไม่ทำมากกว่า หรือ น้อยกว่า 3 เฟส เหตุผล ที่ผมไปสืบค้นมาเนื่องจาก มีการทดสอบ ทดลองกันมาแล้ว พบว่า Generator หรือ มอเตอร์กรณี 3 เฟสนี้ให้ประสิทธิภาพในการการทำงานคุ้มสุดแล้ว ทั้งด้านโครงสร้างและประสิทธิภาพนั่นเอง ดังรูปด้านล่าง แต่มอเตอร์จะมีกี่ขด กี่ โพล ก็ ขึ้น อยู่กับจำนวนแม่เหล็ก ที่โรเตอร์หมุน ซึ่งหลักการทำงานก็ เหมือนกับแบบแปรงถ่านคือ ต้อง จัดไฟเข้าไป ให้เกิด สนามแม่เหล็ก ผลักดูดกัน เพื่อให้ แกนใช้งานมอเตอร์หมุนได้ แต่แบบ BLDC Motor นี้จะมีการทำงานที่ซับซ้อน ขึ้น เพราะ ต้อง จ่ายไฟเข้าไป ให้ถูกจังหวะมีทั้งหมด 6 สเตป ทำไมต้องมี 6 สเตปก็เพราะว่ามอเตอร์มี 3 เฟสหลักในการทำงาน ใน 1 ไซเคิลสามารถแบ่งย่อย สเตปการทำงานย่อยได้เป็น 6 สเตป ต่อไป ขอเรียก 1 ไซเคิล ที่มี 6 สเตปนี้ว่า Sequence และเพื่อป้องกันการหมุน สะดุด หรือ เกิด การล็อคทางสนามแม่เหล็กในตัวเอง จึงต้องมีการตรวจจับสนามแม่เหล็ก ในแต่ละตำแหน่งการหมุนของมอเตอร์นั้น จะมี เซนเซอร์แม่เหล็ก ที่เรียกว่า Hall Sensor ทำหน้าที่ ส่งค่ากลับไปที่กล่องควบคุม เพื่อให้ทราบตำแหน่งของโรเตอร์ ว่าอยู่ลักษณะ อย่างไร จุดนั้นๆ เป็น ขั้วเหนือ หรือขั้วใต้ จะได้จ่ายไฟให้ขดลวดทั้ง 3 ผลัก ดูด หมุนได้อย่างสมบูรณ์แบบ กล่าวต่อไปด้านล่าง เพื่อที่จะ ได้ จัดสเตปการจ่ายกระแสออกไป ที่ขดลวด ทั้ง 3 แบบ สมบูรณ์ โดยจะทำงาน เป็นสเตป ทีละ 2 ขด เพื่อให้เกิดสนามแม่เหล็ก และ มีขดนึงว่าง ทำงานวนๆไป 1 รอบ จะมี 6 เสตป ซึ่งมอเตอร์แบบนี้ ก็ จะแบ่งเป็นแบบที่ไม่ต้องใช้ เซนเซอร์ (Sensorless) กับ ใช้ เซนเซอร์อีก เช่น BLDC Motor ในพวกพัดลม หรือ มอเตอร์รอบสูงๆ จะไม่ใช้ เซนเซอร์ เพราะ ไม่ต้องการความแม่นยำในการหมุนมากนัก ส่วนพวก BLDC Motor ที่ต้องใช้เซนเซอร์คือ ประเภทที่ต้อง ใช้ความแม่นยำ สูง ในการหมุน ออกตัว หรือหมุนช้าๆ เป็นต้น เช่นพวกรถไฟฟ้า แต่ในรถไฟฟ้าก็ มีกล่องควบคุมแบบไม่ใช้เซนเซอร์ ออกมาใช้งานให้เห็นกันมากขึ้นแล้ว เพื่อความสะดวก ในการใช้งาน และ ซ่อมบำรุง BLDC Motor แบบนี้ก็ จะมีหลักๆ ก็จะมี 2 แบบ คือ แบบดุมล้อ (HubMotor Out Run) และ แบบแกนหมุน (BLDC Motor Inner Run) ซึ่งทั้ง 2 แบบก็ มีทั้งแบบมีเกียร์ และ ไม่มีเกียร์ภายใน แต่เราจะเรียกว่าภาษาชาวบ้านว่า "บัสเลทมอเตอร์" หรือ "มอเตอร์ไร้แปรงถ่าน"1.2 .1 แบบดุมล้อ หรือ HubMotor ไม่มีเกียร์ ซึ่งจะอยู่ที่ศูนย์กลางของล้อ ซึ่งที่เราเรียกว่า Hub จึงนิยมติดปากเรียกกันว่า "Hub Motor" นั่นเอง ซึ่งมอเตอร์แบบนี้ ราคาจะสูงกว่าแบบมีแปรงถ่าน และวงจรควบคุมจะมีการทำงานที่ซับซ้อนกว่ามาก ภายในมอเตอร์มีขดลวด 3 ชุดแต่จะมีหลายขดและมีการป้อนกลับของสัญญาณจาก hall sensor ทั้งหมด 3 ตัว ทำงานในลักษณะ Sink และ Soruce คือเป็น Low และ High ตามขั้วของแม่เหล็ก (ซึ่งจะไม่เหมือนกับ Hall Sensor ในคันเร่ง จะมีการทำงานเป็นแบบลิเนียร์เหมือนวอลุ่ม) โดย hall sensor ในล้อนี้จะวางไกล้ๆกัน (เฟสจะต่างกันอยู่ 2 แบบคือ 60 องศา หรือ 120 องศา ซึ่งจุดนี้แล้วแต่บริษัทผู้ผลิตจะออกแบบมา) โดยจะวางไกล้ๆกับขอบล้อติดกับแม่เหล็กในตัวมอเตอร์เอง ซึ่งรวมๆแล้วจะมีสายไฟทั้งส่วนของสายเซนเซอร์และขดลวด ออกจากมอเตอร์ทั้งหมด 8 เส้น) ซึ่ง HubMotor แบบธรรมดาถึงจะปั่นหน่วงอยู่บ้าง (แรงหน่วงจากการดึงดูดของสนามแม่เหล็ก) แต่มอเตอร์ลักษณะนี้ดูแลรักษาง่ายกว่า สามารถจ่ายกระแสออกมาได้สูง 5 - 10A เมื่อนำมาหมุนเพื่อปั่นไฟ มอเตอร์ประเภทนี้จึงนิยมนำไปทำ "กังหันลมผลิตไฟฟ้า" หรือนำไปทำ "จักรยานปั่นไฟ" ซึ่งสามารถนำมาออกแบบให้มีการนำไฟฟ้ามา "ชาจ์ทกลับได้" ดังข้อมูลและการทดลองตามด้านล่างของหน้าเพจนี้.... ตัวอย่างโครงสร้างของ HubMotor แบบไม่มีเกียร์ภายใน มอเตอร์แบบนี้ จะปั่นไฟได้ ทั้ง 2 ทิศทาง และ ใช้งาน เดินหน้า ถอยหลังได้ แต่จะกินพลังงานมากกว่า HubMotor แบบที่มีเกียร์ภายใน ซึ่งจะมีการกินพลังงานน้อยกว่า และ การตอบสนองแรงบิด ที่ดีกว่า
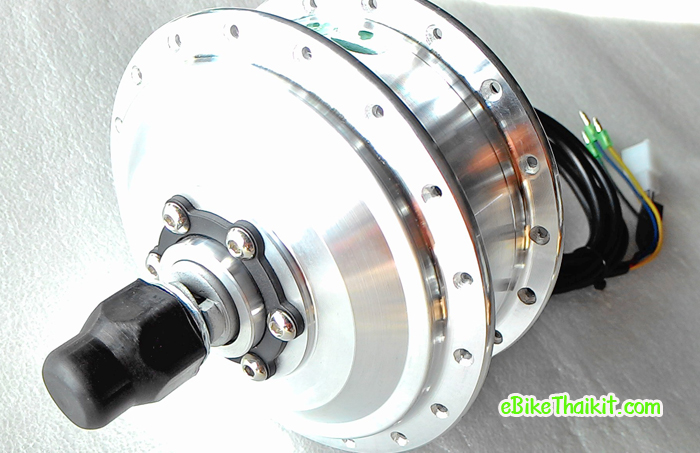
1.2 .1.1 แบบดุมล้อที่ มีเกียร์ ที่เรียกว่าแบบ P lanetary Gear มอเตอร์แบบนี้ จะมีเกียร์ภายใน ช่วยเสริมแรงบิด และ ลดกระกระพือช่วงออกตัว ให้การขับขี่ ที่นิ่มนวลกว่า เวลาเราปั่นตัวเปล่า จะเบาแรงและขนาดเล็กกระทัดรัดกว่า HubMotor แบบไม่มีเกียร์ กินไฟน้อย แรงบิดดี แต่เนื่องจากอุปกรณ์ภายในซับซ้อน ของระบบเกียร์อาจจะเสียหายในอนาคตได้ เมื่อรับแรงบิดสูงๆ เนื่องจากไม่ใช่โลหะ อีกทั้งราคาที่แพงกว่ามากเทียบที่กำลังวัตต์เท่ากัน
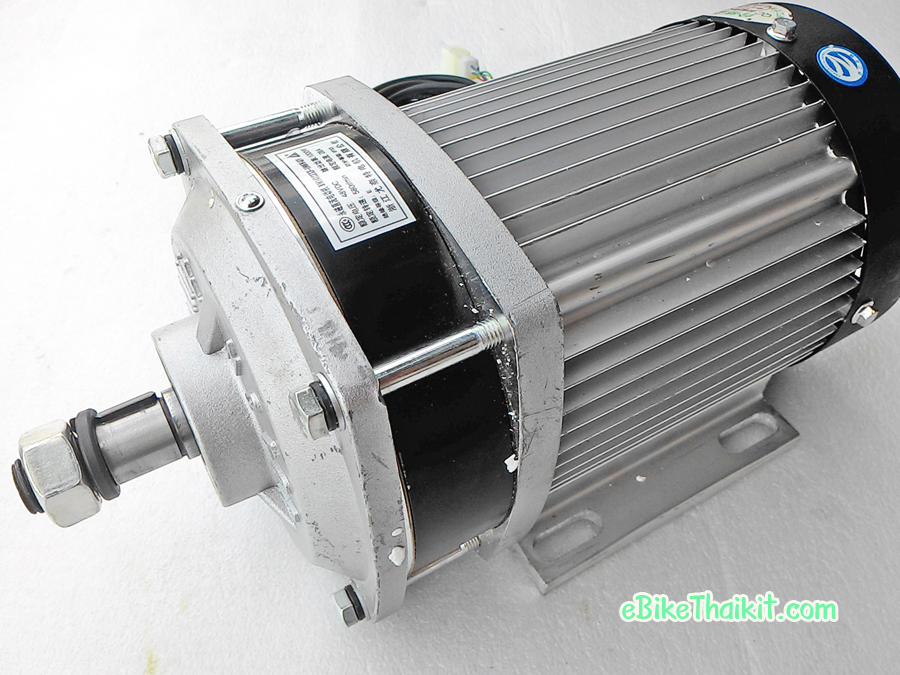
1.2. 2 แบบแกนหมุน (BLDC Motor) มอเตอร์แบบนี้จะเหมาะสำหรับ งานหนัก หรือไม่ก็ งานที่ต้องการประยุกต์ ออกแบบติดตั้งที่ต้องการ กำหนด อัตราทดได้ เพื่อให้ได้รอบ และ แรงบิด ตามที่ต้องการให้เหมาะสมกับการใช้งาน มอเตอร์แบบนี้ก็มีทั้ง แบบมีเกียร์ และ ไม่มีเกียร์ ภายใน ส่วนตัวอย่างด้านล่างเป็นแบบมีเกียร์เพื่อ เน้นใช้งาน บรรทุก ต้องการแรงบิด
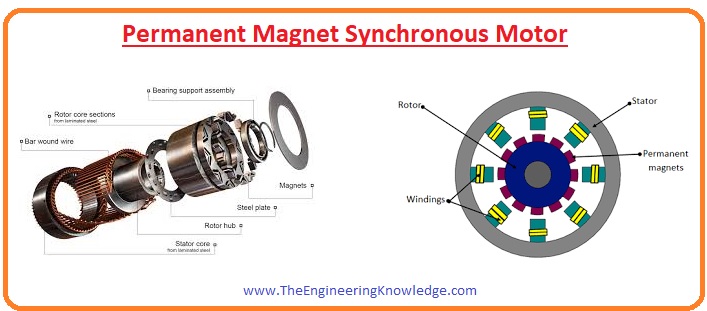
1.3 มอเตอร์ซิงโครนัสชนิดแม่เหล็กถาวร (PMSM) มอเตอร์ซิงโครนัสชนิดแม่เหล็กถาวร (PMSM) คือมอเตอร์ไฟฟ้ากระแสสลับที่กระตุ้นสนามไฟฟ้าโดยใช้แม่เหล็กถาวร และมีรูปคลื่น EMF แบบไซน์กลับด้าน PMSM คือลูกผสมระหว่างมอเตอร์เหนี่ยวนำและมอเตอร์ ไร้แปรงถ่าน ซึ่งคุณลักษณะที่เหมือนกับมอเตอร์ไร้แปรงถ่านแบบ DC คือ โรเตอร์แม่เหล็กถาวรและการพันขดลวดบนสเตเตอร์ อย่างไรก็ตาม โครงสร้างของสเตเตอร์ที่มีการพันขดลวดเพื่อสร้างความหนาแน่นฟลักซ์ แบบไซน์ในช่องว่างอากาศของเครื่องจักรนั้นคล้ายกับมอเตอร์แบบเหนี่ยวนำ ความหนาแน่นของพลังงานนั้น สูงกว่ามอเตอร์เหนี่ยวนำที่มีอัตรากระแสเท่ากัน เนื่องจากไม่มีกำลังเฉพาะจากสเตเตอร์เพื่อสร้างสนามแม่เหล็ก แม่เหล็กถาวรทำให้ PMSM สามารถสร้างแรงบิดจากความเร็วเป็นศูนย์ได้ ซึ่งต้องการอินเวอร์เตอร์ชนิดควบคุมแบบดิจิตอลสำหรับการทำงาน PMSM มักใช้ในตัวขับมอเตอร์ประสิทธิภาพสูง การควบคุมมอเตอร์ประสิทธิภาพสูงนั้นจะสังเกตได้จากการหมุนที่นุ่มนวลในทุกช่วงความเร็วของมอเตอร์ การควบคุมแรงบิดเต็ม ที่จากความเร็วเป็นศูนย์ และมีอัตราเร่งและลดความเร่งได้อย่างรวดเร็ว เพื่อให้สามารถควบคุม PMSM ดังที่กล่าวมาได้ จึงต้องนำเทคนิคการควบคุมเวกเตอร์มาใช้ เทคนิคการควบคุมเวกเตอร์นั้นมีชื่อเรียกอีกอย่างหนึ่งว่าการควบคุมโดยกำหนดทิศทางสนามแม่เหล็ก (Field-Oriented Control - FOC) แนวคิดพื้นฐานของอัลกอริธึมควบคุมเวกเตอร์นั้นคือการสลายกระแสของสเตเตอร์ให้กลาย เป็นส่วนสร้างสนามแม่เหล็กและส่วนสร้างแรงบิด ทั้งสองส่วนสามารถควบคุมแยกกันได้หลักจากถูกสลายแล้ว PMSM ส่วนใหญ่จะนิยมใช้ Encoder เพื่อตรวจจับตำแหน่งของโรเตอร์แทนระบบ HallSensor แบบเดิมๆ เพราะคงทนต่อการใช้งาน ละเอียดและแม่นยำมากกว่า เครดิตภาพ --> https://www.mathworks.com/help/mcb/gs/foc-pmsm-using-quadrature-encoder.html
ข้อดีคือ PMSM แบบ Interior และ Surface จะสามารถให้แรงบิดที่มากกว่า BLDC ได้ และด้วยการควบคุมแบบ Field Weakening แล้วจะทำให้ Speed Range กว้างขึ้นได้
ข้อเสียคือ จะมี Core Loss ที่สูงโดยธรรมชาติ และ Copper Loss ที่สูงขณะอยู่ในโหมด Field Weakening ในความเร็วสูง แต่ประสิทธิภาพรวมก็ยังคงดีกว่ามอเตอร์แบบอื่นอยู่ดี มีปัญหาของ Demagnetization จากแกนเหล็กที่ทำให้คุณสมบัติของมอเตอร์เปลี่ยนแปลงไปตามอุณหภูมิ และปัญหาการเริ่มออกตัว Motor ผู้ผลิตหลายรายใช้ PMSM มอเตอร์ชนิดนี้ เช่น Nissan Leaf, Soul EV และ Toyota Prius ปัจจุบัน เป็นต้น
เครดิตแหล่งที่มา https://th.element14.com/motor-control-permanent-magnet-sync-motor-pmsm-technology
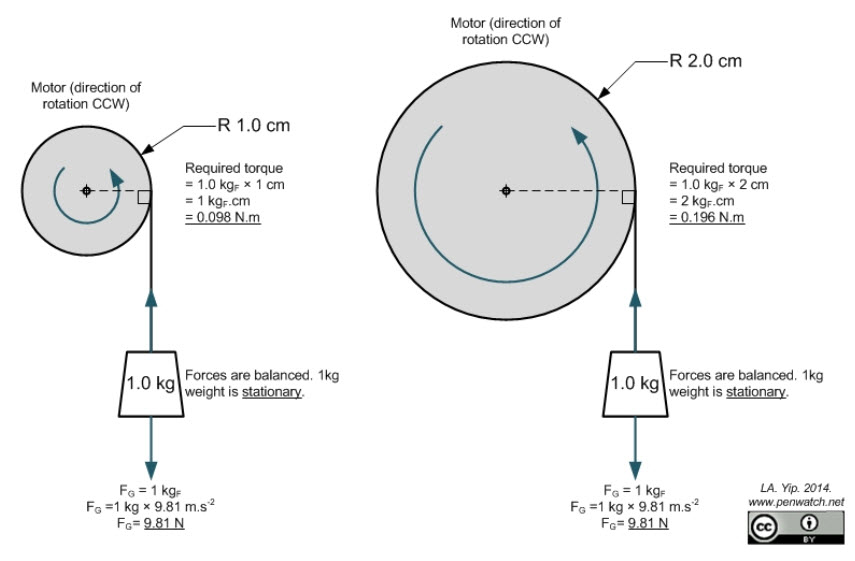
อ้าว !! กี่โวล์ท กี่วัตต์ รอบ และแรงบิด Power (kW) = Torque (N.m) x Speed (RPM) x ค่าคงที่ แรงบิด (T) คือ แรงที่เรากระทำให้วัตถุเคลือนที่จากจุดหมุนเป็นระยะเท่าไร ยกตัวอย่างนึกถึงการขันน็อต ที่จุดหมุนจะเกิดแรงบิด และเกิดแรงกระทำที่ปลายค้ามประแจดังรูป ซึ่งระยะห่างจากจุดหมุนไปถึงแนวแรงคือระยะ r แรงที่มือคือ F ส่วน แรงบิดคือ ที่แกนน็อต ก็จะมีสูตร พื้นฐานทางฟิสิกส์ T = F x r ซึ่งถ้าระยะ r นี้ยิ่งมากแรงบิด ที่ต้องใช้เป็นต้นกำลัง ก็จะสูงเช่นกัน ซึ่ง F นั้นรวมถึงน้ำหนักโหลด แรงเสียดทาน แรงต้านจากอากาศ แรงต้านจากการหมุน เยอะเยอะ งง ไปหมด ซึ่งเด่วดูได้จากสูตร ผมสรุปและทำไว้เป็นไฟล์แล้ว (อ้างอิงมากจากคนอื่นเค้าอีกที) สรุปได้ว่ามอเตอร์หากมี "แรงบิดสูง" จะช่วยให้รับภาระได้มากด้วยนั่นเอง ... Mass (Kg) x a (m/s) x r (m) , a = v/t หากล้อมีขนาดใหญ่ขึ้นก็จะต้องใช้แรงบิดสูงขึ้นตามไปด้วย แรงบิดมีหลายหน่วย ที่เรียกกัน แต่ในที่นี้ขอใช้หน่วย N.m (นิวตัน.เมตร) กล่าวคือเป็นหน่วยของแรงหมุน ของแกนหมุนใดๆ ที่มีรัศมีแกนมอเตอร์หรือ มู่เล่ขนาด 1 เมตร สามารถผลัก หรือ ดึง วัตถุให้เคลื่อนที่ได้ N ตามสเปคที่กำหนด Mass (Kg) x a (m/s) x r (m) = 200 x 1.388 x 0.25 = 69.4 N.m นั่นเอง คือแรงบิดที่ต้องการที่ส่งมาถึงเพลาขับล้อ หาก รถมีระบบเกียร์ทดต่างๆ ก็ ต้อง ย้อน คิดกลับไป เช่นรถมี อัตราทดรวม 1 : 20 (เกียร์ต่ำ) มอเตอร์ก็จะต้องใช้แรงบิดอย่างน้อย 69.4 N.m / 20 = 3.47 N.m แต่หาก รถที่เราทำนั้นใช้ มอเตอร์แบบไม่มีเกียร์ ขับตรงเลยเช่น มอเตอร์ดุมล้อ ก็ ต้องใช้ แรงบิด อย่างน้อยๆ 69.4 N.m เพื่อให้ได้รถที่วิ่งได้ ตาม ต้องการ เป็นต้น สูตรและ ตัวอย่างการคำนวณ เหล่านี้ เป็น แค่แนวทางในการศึกษา อาจจะ มีผิดคลาดเคลื่อน กับความเป็นจริงบ้าง เพราะ การคิดแบบละเอียดนั้น ต้องนำ ค่า ต้านทาง ต่างๆ เข้ามาคิดอย่างละเอียด ไม่ว่าจะเป็น สภาพ ถนน ความชัน ลม ประสิทธิภาพการส่งกำลัง เกียร์ต่างๆ เป็นต้น....ดึงวัตถุ ในแนวดิ่ง โดยมีแรงโน้มถ่วงของโลก สูตรของแรงบิดคือ T (แรงบิด) = F (แรงต้านรวม) x r (รัศมีหรือระยะจากจุดหมุน) จากตั้วอย่างด้านล่าง จะเห็นว่า ถ้าเรา ต้องการ ดึงของหนัก 1kg (9.81N) ขึ้นมา โดยมีรัศมี วงกว้าง 1cm หรือ 0.01m เราอยากรู้ว่า ต้องใช้แรงบิด ในการดึง วัตถุขึ้นมาอย่างน้อย กี่ N.m ก็ใช้เข้า สูตรเลย T = 1 (Kg) x 9.8 x 0.01 (m) = 0.098N.m โดยที่ 1N = 0.10197Kg , 1N.m = 0.10197Kg.m หรือภาษาบ้านเรานิยมคิดเป็นกิโลกรัม 1N.m = 10.19Kg.cm คือมอเตอร์หรือ พูเล่ที่มีรัศมี แกนขนาด 1ซม (Ø 2ซม) จะสามารถ เริ่มยกวัตถุหนัก 10.19 กก. ได้นั่นเอง.. Torque is the cross-product of force and distance: T = F X D So the same weight, at twice the radial distance, will require double the torque .Note that the measurement 'kgcm' is 'kilograms-force × centimetres' and would be clearer if written as kgf.cm which avoids confusion between kg (mass) and kgf (Force) τ = F × d = F × d . So the same weight, at twice the radial distance, will require double the torque. คือ ความเร็วรอบ มอเตอร์ส่วนใหญ่คิดเป็น รอบต่อนาที (RPM) หากไม่ทดเกียร์ข้างใน ความเร็วรอบสูงมากว่า 3,000 รอบต่อนาที ซึ่งหากทดเกียร์แล้วความเร็วก็ลดลงมาตามสัดส่วนที่ระบุ ยกตัวอย่าง หากความเร็วรอบที่มอเตอร์ 3,850 รอบต่อนาทีและมีแรงบิด 1.1 n.m อัตราส่วนทดเกียร์ 9.78 : 1 ความเร็วรอบหลังจากทดแล้วจึงเหลือ 393 รอบต่อนาที ซึ่งแรงบิดที่ปลายเฟืองก็จะสูงขึ้นเช่นกัน คือ 10.8 n.m ความเร็วและแรงบิดนี้ เราสามารถนำไปคำนวณหาความเร็วและน้ำหนักบรรทุกของรถเราได้เลย ซึ่งแล้วแต่การทดเกียร์และขนาด วงล้อของแต่ละคันด้วย..36V 350W มากกว่า ที่จะเลือก 24V 350W มาจำหน่ายนั่นเองครับ เพราะที่ขนาดแบตเท่ากันแต่ระยะเวลาใช้งาน ในการจ่ายไฟจะต่างกัน... ตัวอย่างแนวทางการออกแบบ จักรยานไฟฟ้า หรือ มอเตอร์ไซด์ไฟฟ้า อ้างอิงจากสูตรหลัก ที่บอกไว้ข้างบนแล้วว่า Torque (N.m) = (Power (Kw) x ค่าคงที่) / Speed (RPM) ทำรถยนต์ ไฟล์นี้ ครับอธิบายได้ค่อยช้างเข้าใจ ซึ่งก็ใช้สูตรเหมือนกัน แต่ถ้าเอาละเอียดจริงๆ ก็ จะต้องคำนวณเผื่อ พวกแรงต้านต่างๆ ของสภาพรถเพิ่มเข้าไป เพราะ รถยนต์ มีเรื่องของแรงเสียดทาน แรงต้านทางลม ที่มากกว่า รถจักรยานไฟฟ้าแบบ 2 ล้อ นั่นเอง ก็เป็นแค่แนวทางนะครับ เพราะ ผมเองก็ ไม่ได้เก่ง คำนวณอะไร แต่พยายามหา ข้อมูลเพื่อเป็นอ้างอิง ทางทฤษฎีให้ มากที่สุดครับผม ตัวอย่าง สูตรสำเร็จ เครดิต สูตรเสริมเพิ่มเติม : แรงที่เอาชนะแรงต้านเพื่อเคลื่อนที่ได้ F (N) = m (Kg) x A (m/s) = Tw (N.m) / r (Tw แรงบิดที่แกนเพลา , r คือ รัศมีของวงล้อ) แรงต้านมี หลัก 3 ตัวคือ Rr (แรงต้านจากการหมุน) Ra (แรงต้านจากอากาศ) Rg (แรงต้านทางชัน) ซึ่งแต่ละตัวก็ จะคิดแยกย่อย ตามขนาด สัดส่วน น้ำหนัก ความเร็ว ของรูปลักษณ์ของรถแต่ละ ประเภท เพื่อให้เข้าใจมากขึ้น ลิ้งตัวอย่างด้านล่าง เป็นการออกแบบคำนวณ สเปคสามล้อ Click VIDEO
ตัวอย่างคลิบสอนที่ค่อนข้างเข้าใจมากขึ้น หรือเปล่า ฮ่าาา พอเป็นแนวทางได้ ขอบคุณเครดิตยูทูปช่อง SHIKSHA JN.
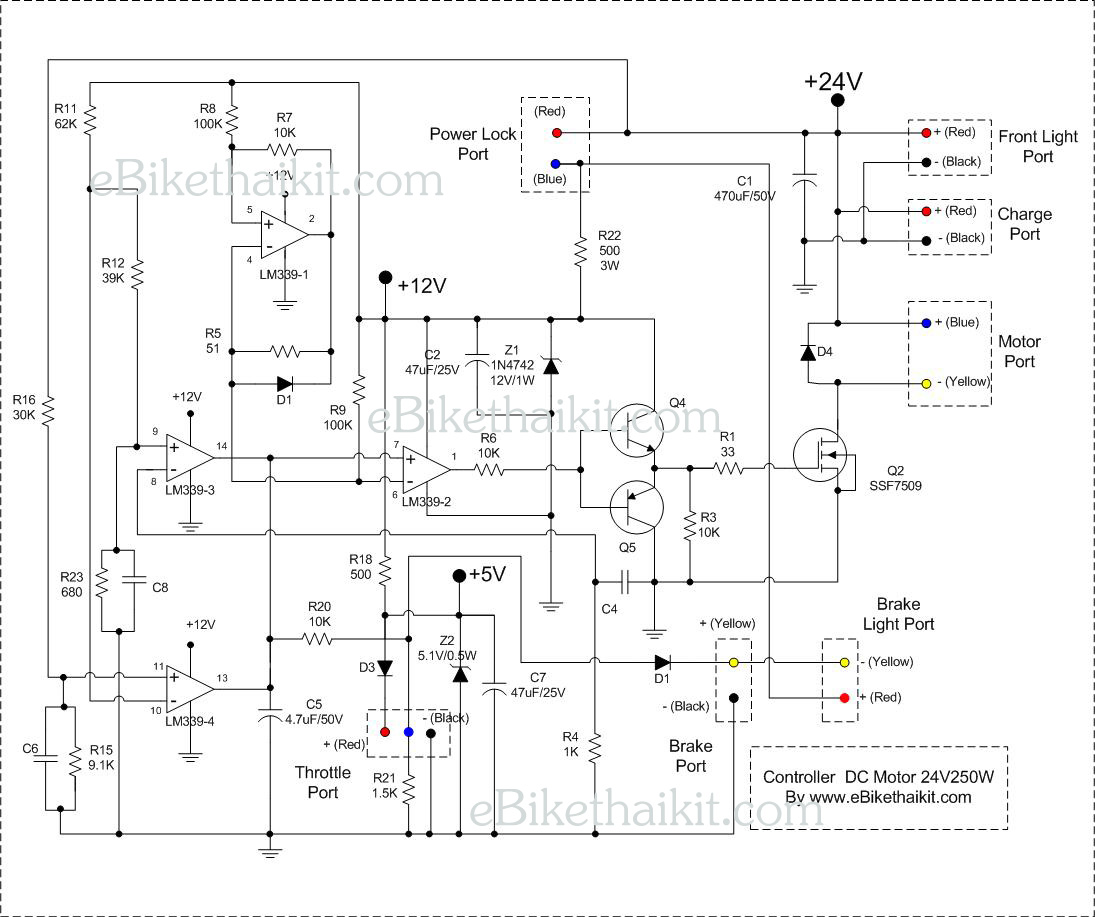
2.1 ชุดควบคุม DC Motor (Brush) ชุดควบคุมมอเตอร์แบบดีซี สร้างไม่ยากเท่าไรนัก โดยส่วนใหญ่จะนิยมกันคือ วงจรแบบ PWM (Plus witdth Modulation) วงจรลักษณะนี้จะดีกว่าวงจรควบคุมมอเตอร์แบบลิเนียร์ทั่วไปตรงที่ สุญเสียพลังงานต่ำ ความร้อนน้อย ทั้งนี้เนื่องจากการทำงานจะเป็นลักษณะพัลส์ คลื่นสี่เหลี่ยมดังรูป ปรับช่วง On-Off ได้ซึ่งเรียกว่า Duty Cycle เช่นถ้า Duty Cycle 100% สัญญาณช่วง Ton จะเป็นเส้นตรงเสมือนกับเราป้อนไฟให้มอเตอร์ตรงๆ นั่นเอง หากDuty Cycle ]ลดเหลือ 50% สัญญาณช่วง Ton จะเป็น 1/2 ของสัณญาณทั้งหมดใน 1 คาบเวลาส่งผลให้แรงดันออก 50% ของแหล่งจ่ายเป็นต้น การทำงานลักษณะนี้กำลังงานสูญเสียจึงน้อย เพราะภาค Output ไม่ต้องทำงานตลอดเวลา ภาค Driver ที่เห็นๆ กันอยู่มักใช้ - Opamp เพื่อกำเนิดสัญญาณฟันเลื่อย และใช้ Opamp อีกตัวมาทำการ Compare แรงดันกันเพื่อให้ได้ สัญญาณ PWM ดังวงจรทางขวามือ แบบนี้ค่อนข้างจะพิเศษมาก เนื่องจากต้องมีการเขียนโปรแกรมเพื่อใส่เข้าไปอาจจะเป็นภาษา Assembly หรือภาษาซี การใช้ IC ไมโครคอลโทรลเลอร์มาทำ PWM นี้นิยมไปทางแนวทำหุ่นยนต์ หรือการควบคุมมอเตอร์แบบเฉพาะทางที่ต้องการ ควบคุมแบบมีเงื่อนไขหลายๆอย่างภาค Power คือส่วนที่ต่อกับมอเตอร์และรับแรงดันไฟหลักโดยตรง เพื่อขับเคลื่อนมอเตอร์ให้ทำงานได้ ภาคนี้เองอาจจะมีการต่อชุด Feedback กลับไปยังภาคคอลโทรลเพื่อสามารถควบคุมการทำงานให้เสถียรขึ้นได้ ส่วนใหญ่ภาคนี้จะใช้ Power Mosfet เนื่องจากไม่ต้องการกระแสจากภาค Driver สูงซึ่งต่างจาก Transistor ที่ต้องการกระแสเพื่อขับเบสที่มากทีเดียว ความร้อนก็สูงตามมาด้วยเช่นกันคลิ๊ก
2.2 ชุดควบคุม HubMotor (Brushless) ก่อนที่เราจะออกแบบวงจรควบคุมมอเตอร์แบบบัสเลทนี้ เราจำเป็น ต้อง เรียนรู้ ก่อนว่ามอเตอร์ แบบนี้ มีพื้นฐานในการทำงานได้อย่างไร ซึ่งคลิบด้านล่างนี้เป็นตัวอย่างที่ดี เข้าใจง่ายVIDEO
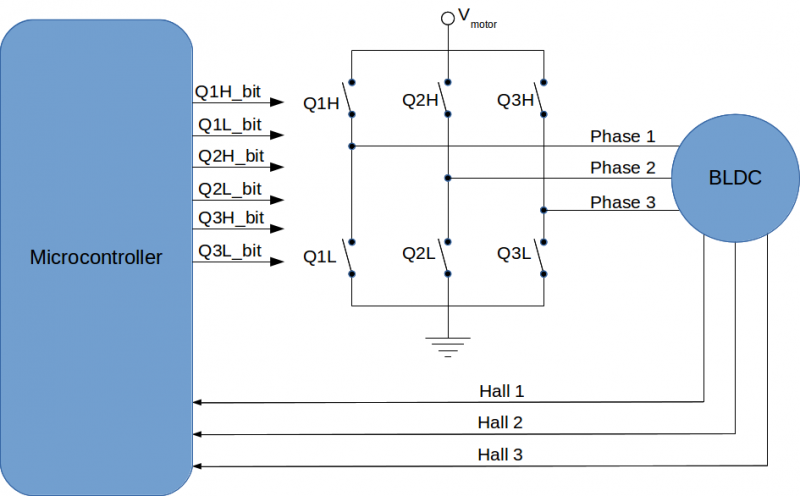
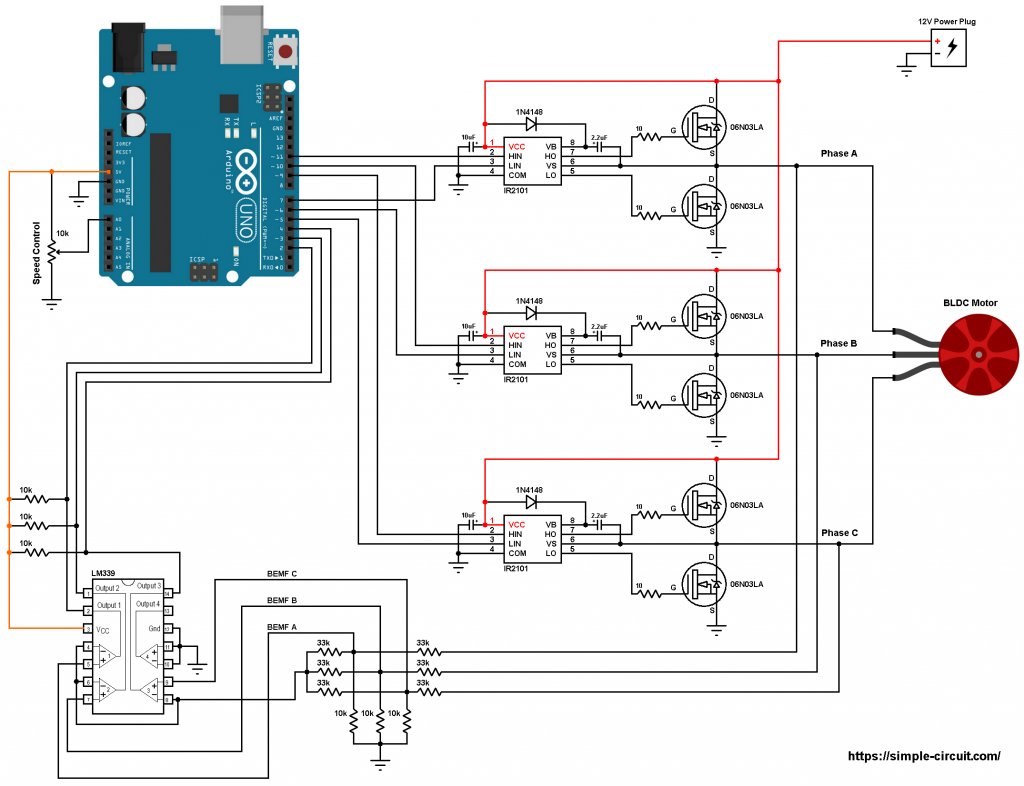
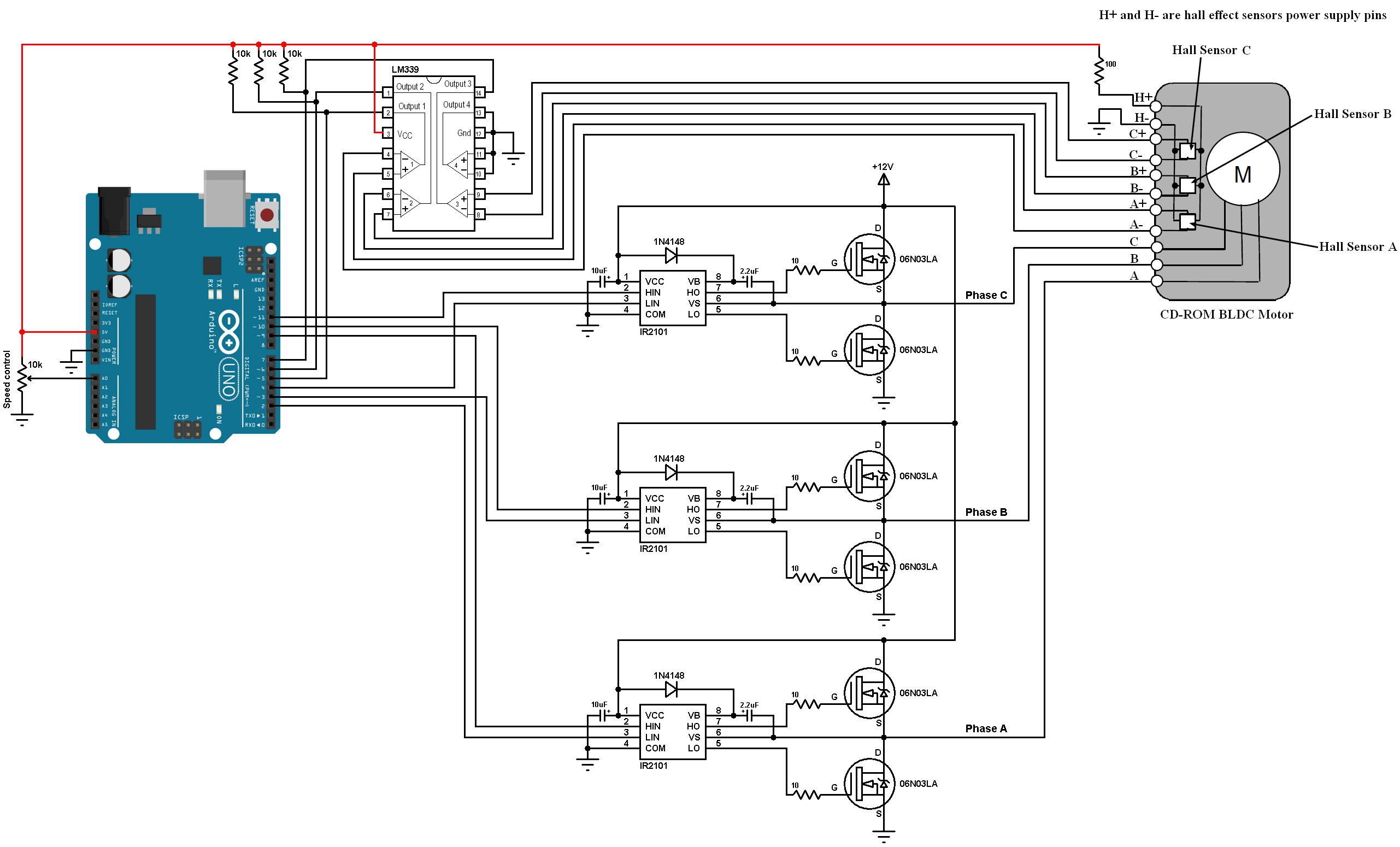
รูปแบบโครงสร้างการควบคุม BLDC Motor จะใช้อุปกรณ์ที่เป็น Power SW เช่น Mosfet , IGBT มาทำหน้าที่ จัดทิศทางกระแสที่ไหล เข้า สู่ ขดลวด ของมอเตอร์ เพื่อ สร้างสนามแม่เหล็ก ให้ มอเตอร์ หมุน ทำงานได้ โดยสั่งการ จาก ไมโครคอลโทรลเลอร์ หรือ IC ควบคุม ซึ่งจะต้องรับสัญญาณจาก Hall Sensor FeedBack กลับมา เพื่อให้ไมโคร รับรู้ ถึงตำแหน่งของการวางตัวของ แม่หล็ก และ ขดลวด เพื่อให้การสร้าง สนามแม่เหล็ก หมุน
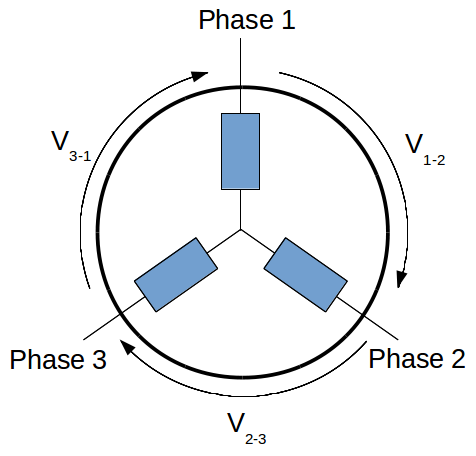
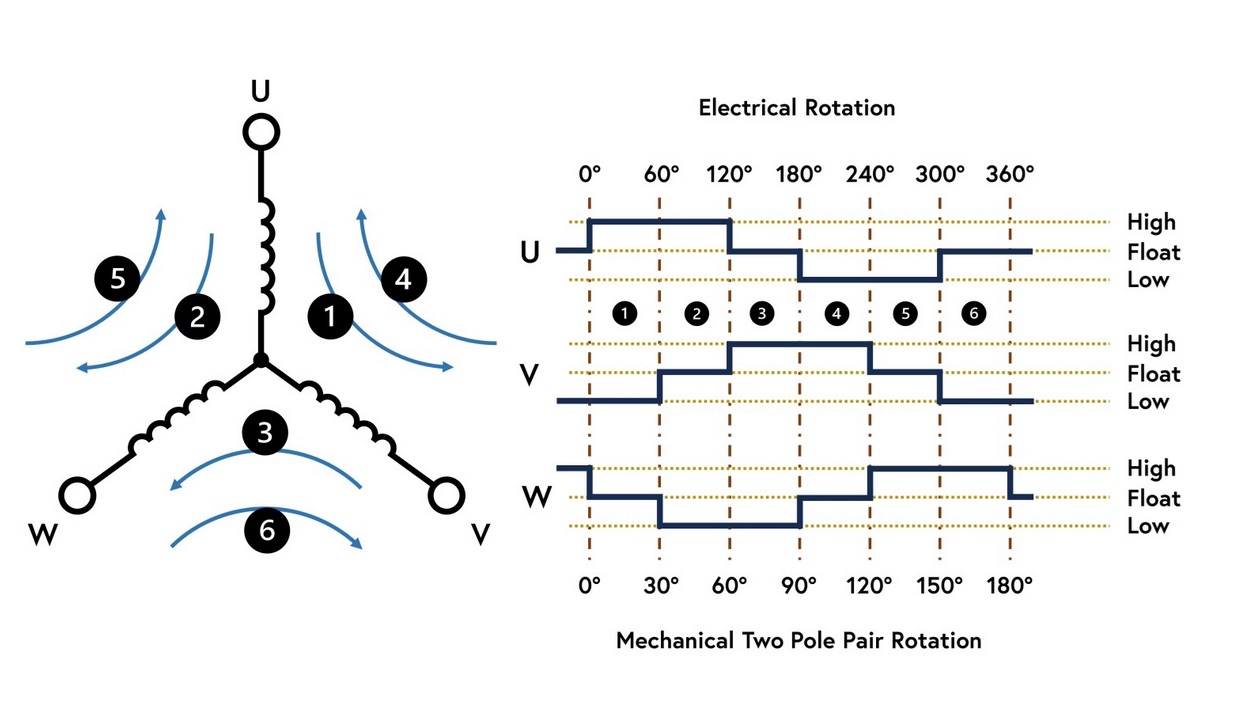
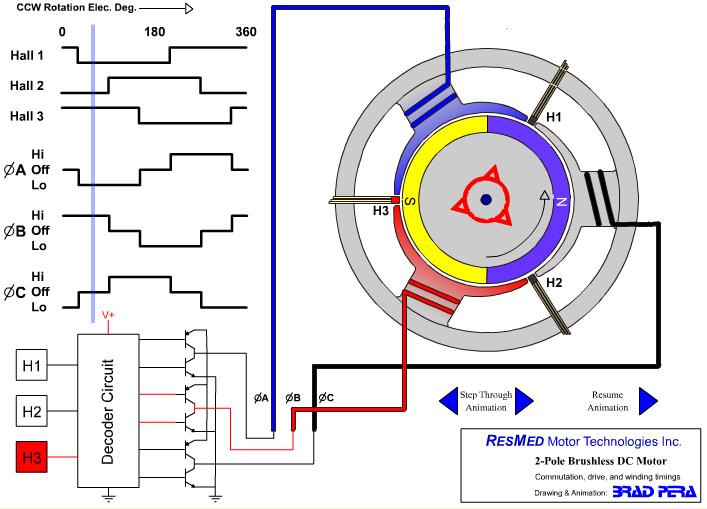
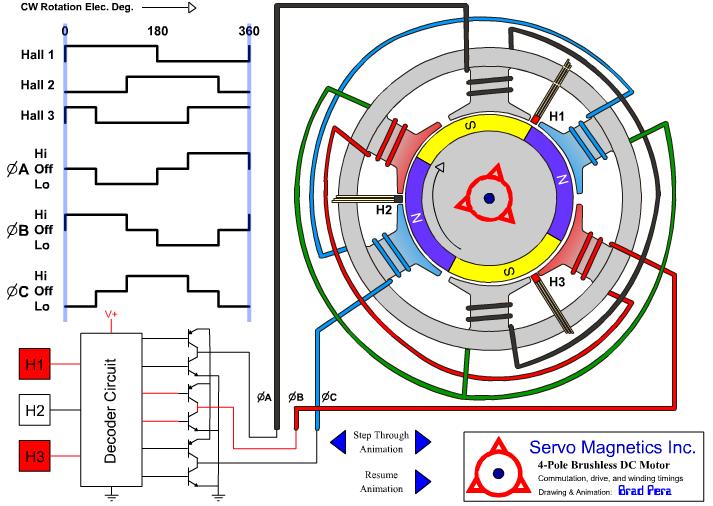
รูปแบบ วงจรสมมูลย์ ขดลวดของ BLDC Motor จะมีพื้นฐานอยู่ 3 ขด หรือ 3 เฟส แต่ถ้าเรารื้อมอเตอร์ ออกมา แล้ว เจอ หลาย ขด หลายโพล ก็ไม่ต้องแปลกใจเพราะ ทางโรงงาน จัดวางตำแหน่งชุดละ 3 ขดตามรูปด้านซ้าย แต่ จะ วางเป็นมุมที่สัมพันธ์กัน ในความคิดเห็นส่วนตัว คลาดว่าน่าจะมาจากเรื่อง ของการกำหนด สเปค รอบ และ แรงบิด ถูกกำหนดด้วยขนาด ของแม่เหล็ก ที่ใช้ประกอบ หากใช้แม่เหล็กชิ้นใหญ่ ขนาดโพล ก็ ต้องให้มีหน้าตัดใหญ่ เท่ากับ พื้นที่หน้าตัด ของแม่เหล็ก นั้นๆ จำนวนโพลหรือ ขดลวด ก็ จะน้อยลง ความเร็วรอบก็ จะสูงขึ้น แต่แรงบิดก็ ตกไป ส่วนบัสเลทแบบดุมล้อนั้น ต้องใช้แรงบิด แต่ไม่เน้นรอบ ก็ จะใช้แม่เหล็ก ที่ขนาดเล็กลงและ มีการจัดโพลขดลวด ที่มากขึ้น เพื่อให้ได้แรงบิด แต่ก็ได้รอบที่น้อยลงนั่นเอง ทั้งนี้ ทั้งนั้นก็ ขึ้นอยู่กับว่า ทางโรงงานจะออกแบบมอเตอร์นั้นเพื่องานแบบไหน แล้วแต่สเปค ก็ว่ากันไป..HallSensor U V W ตามลำดับ 1 1 0 0 1 0 0 1 1 0 0 1 1 0 1 1 0 0 รูปแสดงความสัมพันธ์การทำงานองศาทางไฟฟ้า 0-360 องศา และ องศาการหมุนของโรเตอร์ ตามกราฟด้านบนมอเตอร์นี้มี 2 Poe Pair หรือมีขดลวด UVW จำนวน 2 ชุด ฉะนั้นใน 1 Cycle ทางไฟฟ้าโรเตอร์จะหมุนได้แค่ ครึ่งรอบ หรือ 180 องศาทางกลนั่นเอง หรือให้เข้าใจง่ายๆ ถ้ามี Pole Pair มากขึ้น รอบจะช้าลงแต่แรง แต่แรงบิดจะสูงเพราะใน 1 รอบทางกล มีความละเอียดพัลส์ Cycle ที่ถี่กว่ามักเห็นในมอเตอร์แบบดุมล้อ Pole Pair เยอะรอบน้อยแต่แรงบิดดี กลับกันถ้า Pole น้อยรอบจะเยอะ แต่แรงบิดจะตก เช่นในพวกมอเตอร์บัสเลท แบบแกนหมุน Inner Run มอเตอร์ประเภทนี้รอบจะสูงแต่แรงบิดจะน้อยกว่า แต่แก้ไขกันโดยมีเกียร์ทดมากับมอเตอร์เห็นมากในพวก มอเตอร์เพลา BLDC Gear Motor เป็นต้น... https://www.elektormagazine.com/articles/a-beginner-s-guide-to-controlling-bldc-motors
VIDEO
VIDEO
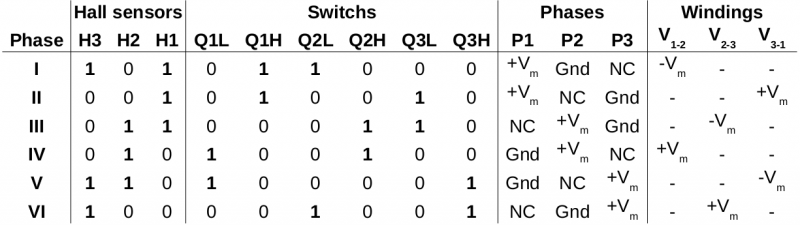
ตารางการจ่ายไฟให้ของขดลวดทั้ง 3 ของ BLDC Motor โดยกำหนดอ้างอิงตามสัญญาณจาก HallSensor ทั้งหมุนตามเข็ม และ ทวนเข็ม
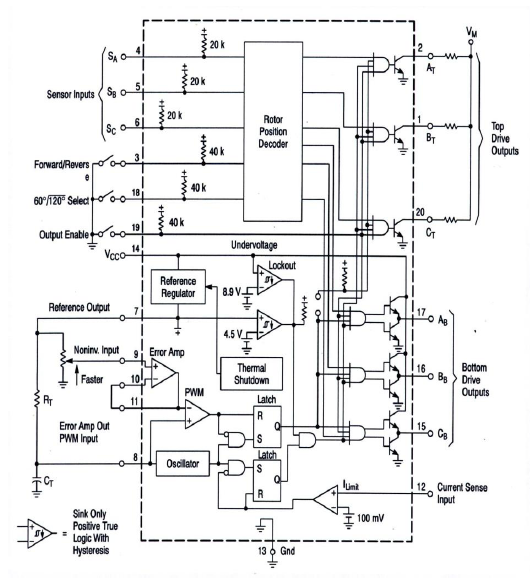
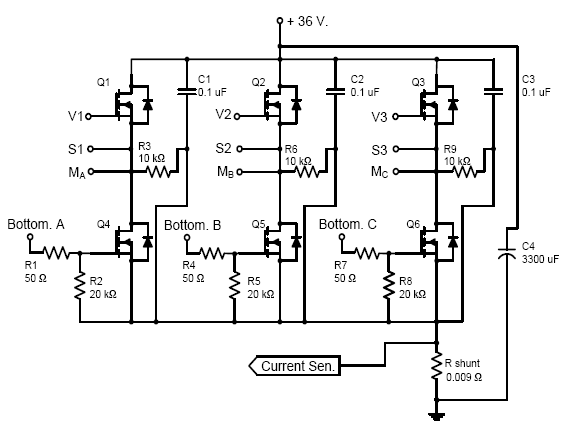
ตามเข็ม ตารางสถานะการทำงานแบบหมุน ทวนเข็ม ตัวอย่างภาค Driver แบบ IC สำเร็จรูปเพื่อเป็นแนวทางและเพื่อการศึกษา IC เบอร์ MC33033 เป็นไอซีสำเร็จรูปถูกออกแบบมาเพื่อใช้งานกับมอเตอร์ไม่ใช้แปรงถ่าน (Brushless DC Motor) หรือ ที่เราเรียกกันว่า HubMotor การใช้งานหลักๆ ก็ดู DataSheet ก็จะเข้าใจดียิ่งขึ้นครับ หากกล่าวโดยสรุปภาคขับ Gate Power Mosfet และ ภาค Power Output
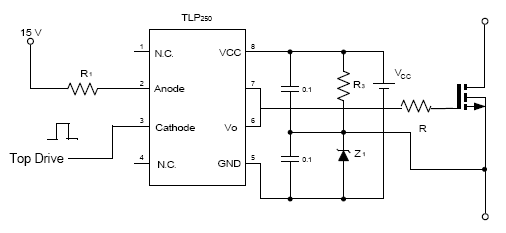
เนื่องจากแรงดันจากไอซี MC33033 ไม่สามารถขับเกทเพาเวอร์มอสเฟตทั้ง 6 ตัวได้ จึงต้องใช้ IC TLP250 ทำหน้าที่ขับขาเกทของเพาว์เวอร์มอสเฟท ทั้งหมดจำนวน 6 ตัวอย่างดังรูปด้านล่าง (ต้องสร้างวงจร IC TLP250 จำนวน 6 ชุดเพื่อขับเกทของเพาว์เวอร์มอสเฟท แต่ละตัวคือ Bottom Drive 3 ตัวและ Top Drive 3 ตัว สรุปได้ว่าไม่ว่าจะออกแบบวงจรเอง (ใช้ไมโครคอนโทรลเลอร์) หรือจะใช้ IC สำเร็จรูปเราต้องดูว่ามอเตอร์เรานั้นออกแบบระบบ Sensor encoder มา 60 หรือ 120 องศา จากนั้นจึงมากำหนดการรับข้อมูลเข้าเงื่อนไขของแต่ละ State ให้สอดคล้องกับเอ้าพุทที่จะไปขับ Mosfet ทั้งชุดบนและชุดล่าง เพื่อที่จะจ่ายไฟให้ขดลวดเป็นจังหวะเป็น State และเหนี่ยวนำผลักดันกับแม่เหล็ก เพื่อให้มอเตอร์หมุนไปได้อย่าง ราบเรียบและเป็นจังหวะไม่สะดุด กล่าวคือ Hall Sensor ในมอเตอร์จะเป็นตัวกำพหนดบอกตำแหน่งให้กล่องรับรู้และจ่ายสัญญาณขับ Mosfet ไปในแต่ละขดทั้ง 3 ชุดของมอเตอร์อย่างเป็นระบบ ส่วนความเร็วช้าของมอเตอร์ก็จะใช้หลักการ PWM เช่นเดียวกับมอเตอร์ดีซีธรรมดา
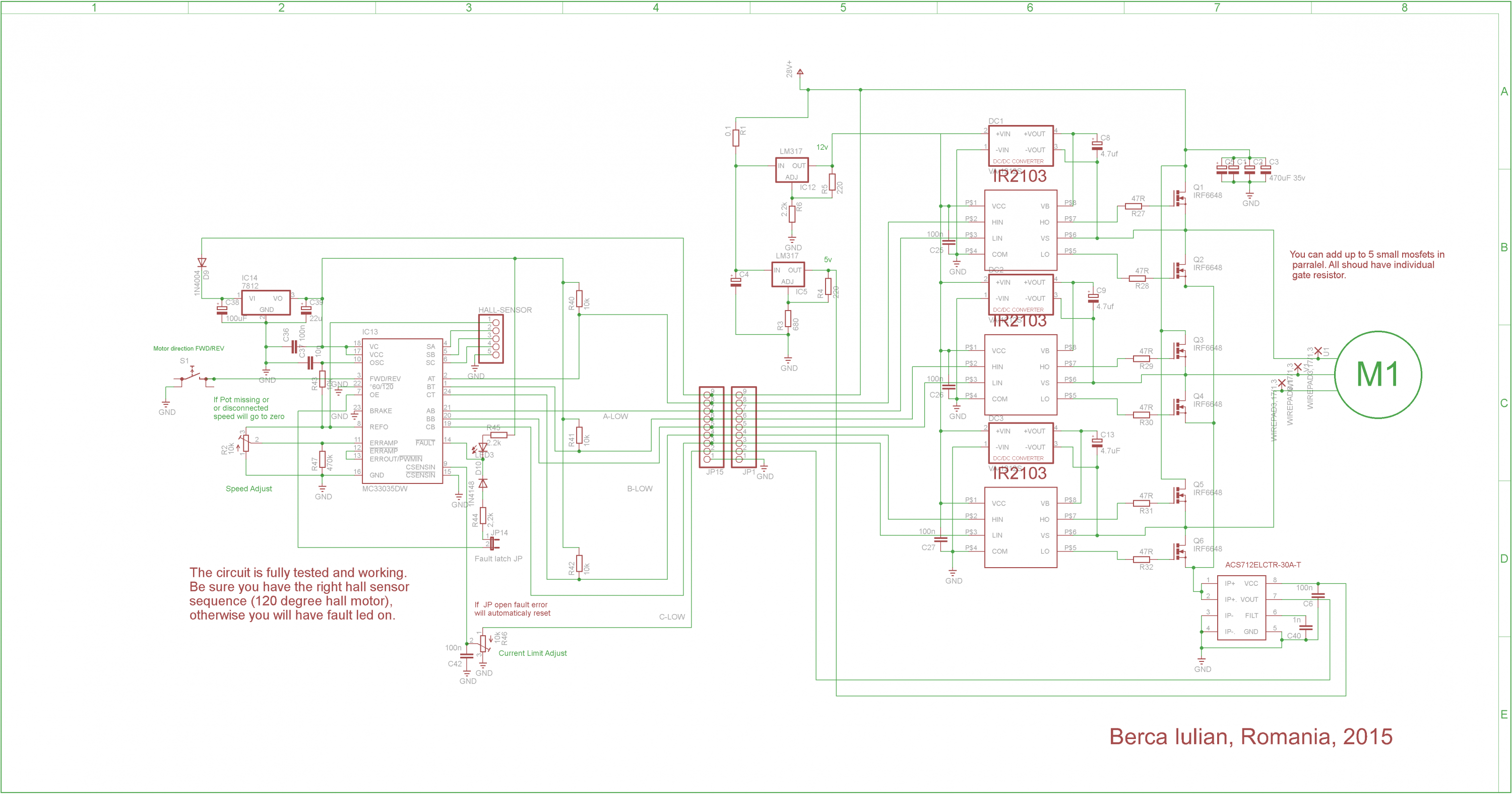
ตัวอย่างวงจรแบบใช้ IC MC33035 เป็นตัวควบคุมหลัก
หมายเหตุ : หากเรานำ HubMotor ที่มีคนละองศาเฟส กับกล่องควบคุมมาใช้ด้วยกัน เช่นมอเตอร์เป็นแบบ 120 องศา และกล่องควบคุมเป็นแบบ 60 องศา ถึงจะกลับสายสลับกันไปมาอย่างไรมอเตอร์ก็จะหมุนเดินหน้า-ถอยหลัง สดุดไม่ราบเรียบต้องแก้ปัญหาด้วยการแปลงองศาเฟสให้ตรงกันด้วย วงจรแปลงองศา 60/120 หรือไม่ก็ใช้มอเตอร์กับกล่องที่มีองศาเฟสเดียวกัน ซึ่งในบางกล่องจะสะดวกหน่อย จะมีจั้มเปอร์ให้เลือกได้ว่า 60/120 หรือเอาง่ายๆ หากล่อง หรือ วงจรควบคุมที่ไม่ต้องใ ช้สัญญาณจาก HallSensor ไปเลยก็จบดี เน้นทำงานได้ไม่ต้องเรื่องเยอะ !!
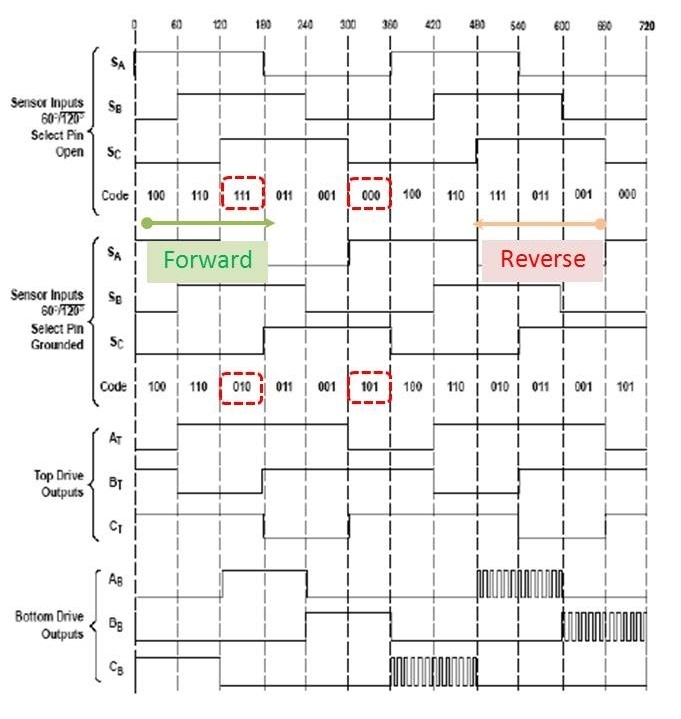
Timming Diagram รูปคลื่นของไอซี MC33033 แต่ละจุดเมื่อโรเตอร์มอเตอร์หมุน ทั้งแบบ 60 และ 120 องศา ตัวอย่างอ้างอิง มอเตอร์ของทางร้านใน 1 รอบหมุนของมอเตอร์จะเกิด 23 Cycle หรือทั้งหมด 138 State หากสังเกตุจะเห็นว่าแบบ 60 และ 120 องศาจะมี State ที่ต่างกันอยู่ 2 State คือ State ที่ 3 และ 6 ซึ่งจุดต่างตรงนี้เราสามารถนำไปออกแบบวงจรเพื่อให้มอเตอร์และกล่องควบคุมทำงานด้วยกันได้ ไม่ว่าองศาจะต่างกันก็ตามโดยการหลอกสัญญาณช่วงดังกล่าวให้ตรงกันนั่นเอง ส่วนหลักการเดินหน้าหรือถอยหลังกล่องควบคุมก็ใช้ข้อมูลดังกล่าวเป็นตัวกำหนดการหมุนและทิศทางของมอเตอร์ด้วยเช่นกัน
วงจรภาค Power Output ใช้เพาเวอร์มอสเฟท 6 ตัว (Top และ Bottom) เพื่อทำหน้าที่รับสัญญาณจากภาค Driver มาขับขดลวดของมอเตอร์ทั้ง 3 เฟส รูปแบบการขับถูกกำหนดจากข้อมูลที่มาจาก Hall sensor ทั้ง 3 ตัวที่อยู๋ในมอเตอร์ (ใน 1 Cycle จะมี 6 State)โดยดูรูปแบบจาก Timming Diagram ด้านซ้ายมือ
VIDEO VIDEO
เครดิตลิ้ง ---> https://www.youtube.com/@ElectronicSpecifier เครดิตลิ้ง ---> https://www.youtube.com/watch?v=jn5tiSIo5xc
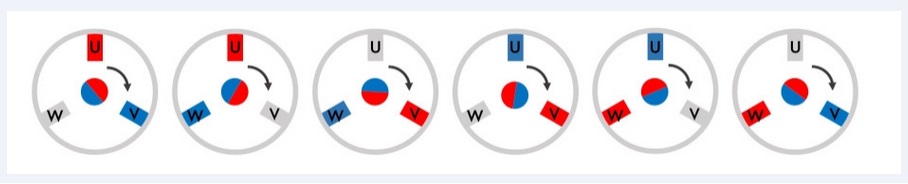
ตัวอย่างการทำงานของ BLDC Motor แบบพื้นฐานแม่เหล็ก 2 ขั้ว "คลิกที่รูป" ตัวอย่างการทำงานของ BLDC Motor แบบแม่เหล็ก 4 ขั้ว "คลิกที่รูป" รูปจำลองสนามแม่เหล็ก ขณะมอเตอร์ทำงาน โดยความเข้มของสนามแม่เหล็กดูได้จากแถบสีมุมบนขวา
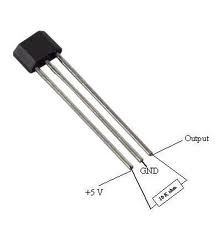
3. ชุดคันเร่ง หลักการทำงานของคันเร่งก็เหมือนวอลลุ่มทั่วไปคือสามารถเร่งหรี่ ปรับแรงดันขาออกได้ 1-4 โวลท์โดยประมาณ แต่ภายในจะไม่ใช้วอลลุ่มแต่จะใช่ Hall Sensor (เซนเซอร์สนามแม่เหล็ก) แทนเนื่องจากคงทนและแม่นยำกว่าวอลลุ่มที่เราพบเห็น HallSensor มีลักษณะเหมือนทรานซิสเตอร์มี 3 ขาคือ ขาไฟเลี้ยง 5 โวลท์ ขากราวด์ และขาไฟออก ซึ่งภายในคันเร่งจะมีแม่เหล็กลักษณะทรงโค้งฝังอยู่ในตัวบิด (บางตัวก็วางแม่เหล็กเป็น 2 ชิ้นโดยมีเซนเซอร์วิ่งรับ สนามแม่เหล็กอยู่ตรงกลาง เมื่อเราบิดคันเร่งก็จะเกิดสนามแม่เหล็กเหนือ ใต้ที่ต่างกันออกไป ให้ Hallsensor แปรผันเป็นแรงดันไฟ ส่งไปให้ชุดควบคุมรับรู้อีกทีหนึ่ง (ส่งเป็นไฟธรรมดาไปนี่ล่ะ ไม่ใช่พัลส์อะไรทั้งนั้นใช้มิเตอร์เข็มวัดได้เลย) ชุดคันเร่งบางรุ่นพิเศษหน่อย มีวงจรตรวจระดับแรงดันแบตติดมาให้ด้วย... (หากจะประหยัดต้นทุน บางท่านอาจจะใช้ วอลลุ่มค่าสัก 10k ต่อกับ ขาด้านหนึ่งต่อไฟ 5 โวลท์ อีกด้านหนึ่งลงกราวด์ ส่วนขากลางก็เป็นแรงดันเอ้าพุท ส่งไปภาคคอลโทรล เท่านี้ก็สามารถใช้เป็นคันเร่งได้แล้ว เท่ไปอีกแบบ) ไฟ LED ตรงคันเร่งบิด จะบอกไฟต่างๆ ดังนี้ - สีเขียว ด้านบนแสดงสถานะ แบตเตอรี่เต็มพร้อมใช้งาน
- สีเหลือง แสดงสถานะ เตรียมตัวชาร์จแบตเตอร์รี่ได้แล้ว พลังงานกำลังจะหมดแล้ว - สีแดง ด้านล่างแสดงสถานะ ให้ชาจ์ทไฟได้แล้ว
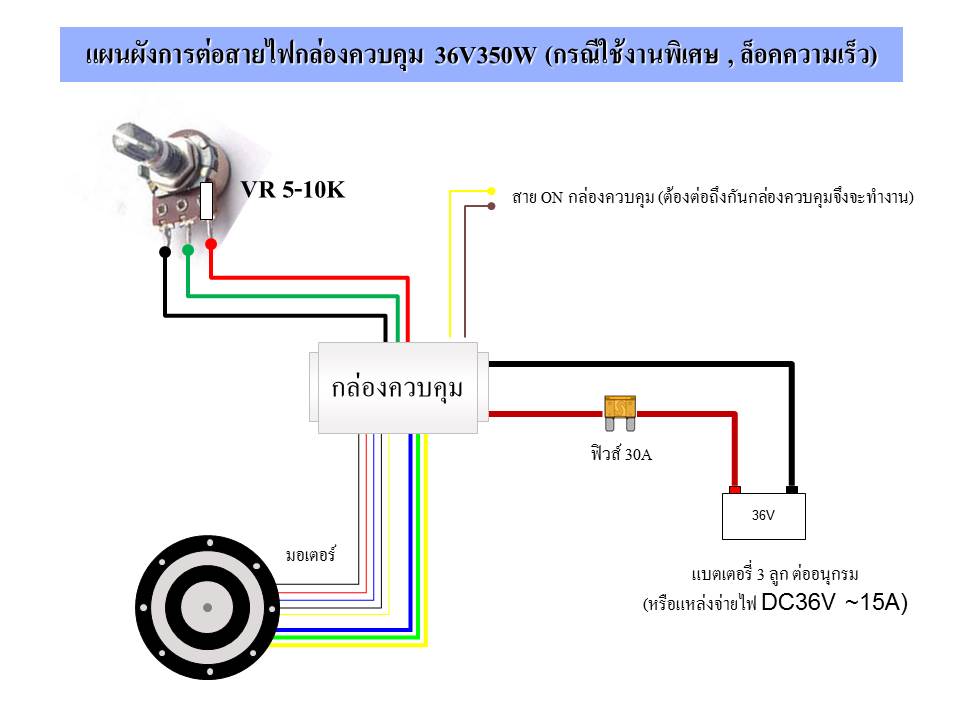
แนวทางการต่อวอลุ่มแทนคันเร่ง Fix Speed
เราสามารถใช้ VR 5K-10K มาประยุกต์ใช้ควบคุมความเร็วแทนคันเร่งได้ กรณีต้องการ FIX Speed เช่นทำปั้มน้ำ สายพานลำเลียง หรือระบบที่ต้องการให้รอบคงที่ตามที่กำหนด...
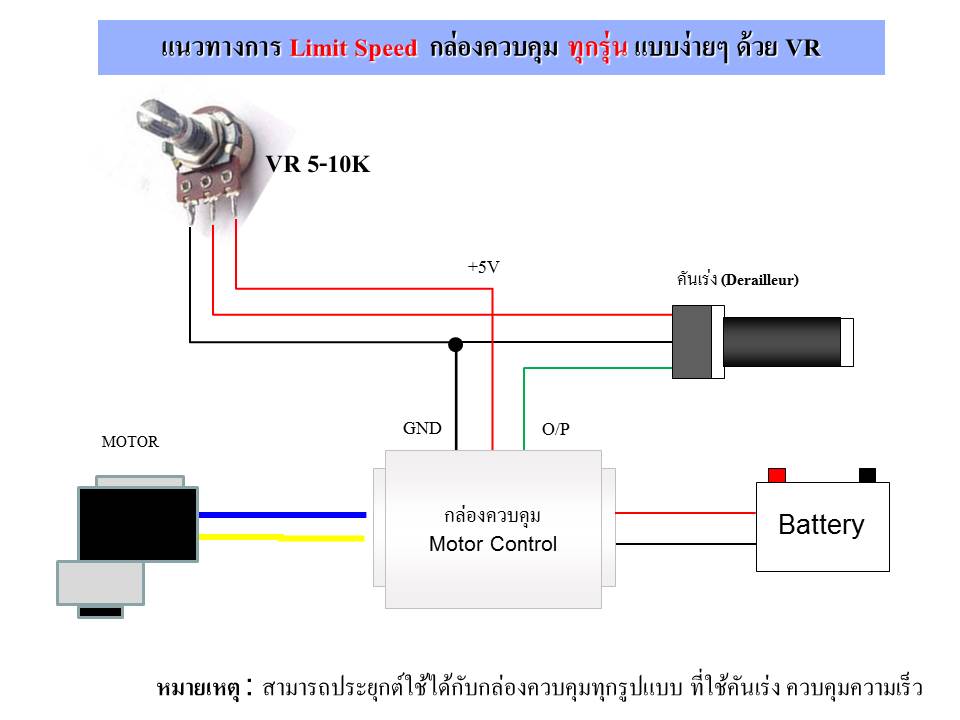
แนวทางการต่อวอลุ่ม เพื่อ Limit Speed VR 5K-10K นำมาประยุกต์ใช้จำกัดความเร็วรอบมอเตอร์ลงได้ ตามที่ต้องการ โดยต่อร่วมกับคันเร่งเดิม โดยปรับ VR ให้ได้ความเร็วรอบที่ต้องการ เมื่อบิดคันเร่ง 100% เหมาะสำหรับใช้ ในรถเด็ก คนแก่ คนชรา คนพิการ หรือ ระบบที่ต้องการ จำกัดความเร็วในการใช้งาน เพื่อความปลอดภัย และเหมาะสมกับการใช้งาน
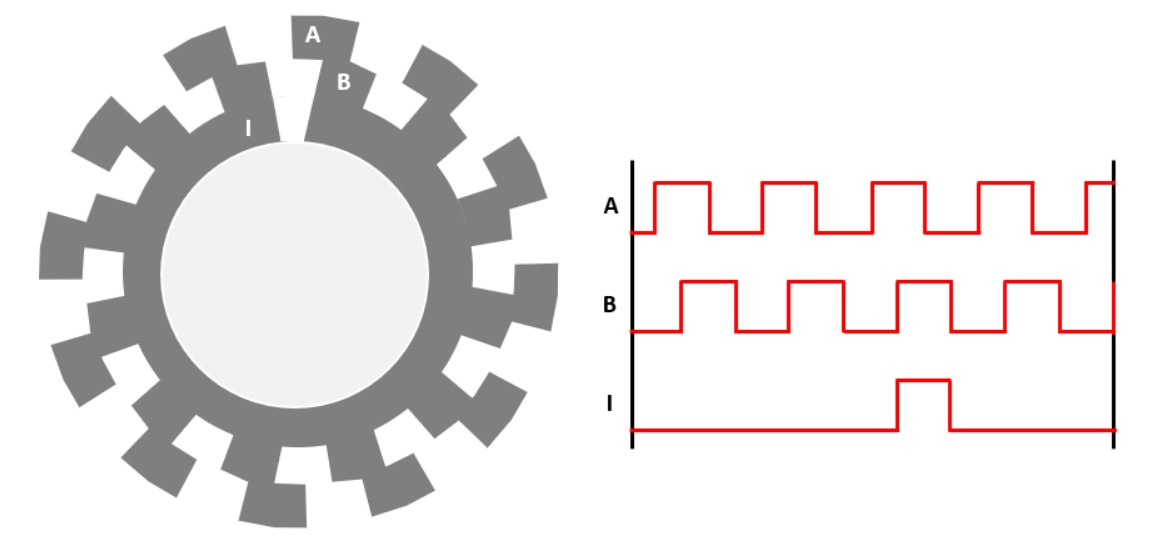
ระบบ PAS นี้จะมีให้เห็นในจักรยานไฟฟ้าที่ขายสำเร็จ ราคาอาจจะสูงซักหน่อย ระบบที่ว่าก็ไม่มีอะไรที่พิเศษมากมายจนเรา จะศึกษาไม่ได้ครับ กล่าวคือระบบนี้เป็นระบบที่ช่วยผ่อนแรงของเราขณะขับขี่โดยที่เรา ไม่ต้องบิดคันเร่งแต่ใช้เท้าปั่นบันไดถีบให้รถเคลื่อนตัวออกไป เจ้าระบบที่ว่านี้จะมีเซนเซอร์แม่เหล็ก เหมือนกับที่อยู่ในคันเร่งนั่นละครับ ซึ่งที่ตัวจานปั่นก็จะมีการติดตั้ง จานซึ่งติดตั้งแม่เหล็กขนาดเล็กไว้รอบจาน เป็นระยะที่เท่ากัน (บางรุ่นอาจจะใช้เซนเซอร์แสงแล้วเจาะรูจานหมุนก็มี) ดังรูปข้างขวา เมื่อเราปั่นจานก็จะหมุน เซนเซอร์ก็จะ ส่งสัญญาณทั้งนี้ทั้งนั้น ระบบ PAS นี้ก็ไม่จำเป็นหากผู้ขับขี่ควบคุมการทำงานของมอเตอร์ ด้วยคันเร่งอยู่แล้วจะเร็วจะช้า หรือจะปั่นช่วยก็ขึ้นอยู่กับผู้ขับขี่จะควบคุมอยู่แล้วนั่นเอง...
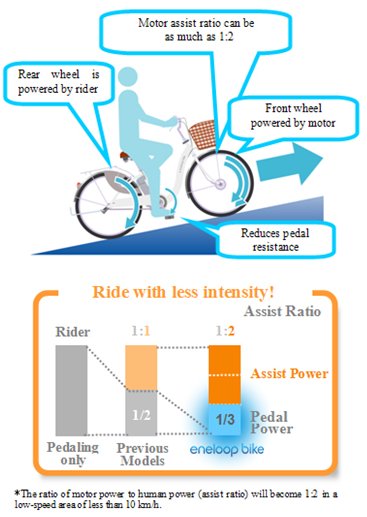
แถบจานติดตั้งแม่เหล็ก และ Sensor แม่เหล็ก อัตราส่วนการทำงานของมอเตอร์ มอเตอร์ช่วยจะทดแรงผู้ขับขี่ขณะปั่น ตามแต่ละสถานการณ์
รู้ได้อย่างนี้แล้วก็ลงมือทำกันเลย จักรยานไฟฟ้า คันแรกของผม (จุดกำเนิดที่มาของเวบนี้) เรื่องก็มีอยู่ว่า จักรยานที่ใช้ขี่อยู่ตอนเรียนนั่นล่ะ (2004) พอเรียนจบจะจอดเฉยๆ ก็กลัวจะพังไป ประกอบกับน้ำมันที่แพงขึ้นทุกวัน จึงเป็นแนวคิดอยากลองสร้างไว้ใช้งาน เดินทางไกล้ๆ ในระแวกหมู่บ้านแทนมอเตอร์ไซด์ซักคัน ขั้นแรกก็ไปคลองถม บ้านหม้อเพื่อหาอะไหล่กันก่อนเลยส่วนประกอบหลักก็มีดังนี้
2. Battery 12V,12Ah จำนวน 3 ลูก (สมัยนั้นแบตแห้งก็ถือว่าเทพแล้ว สุดๆ อ่ะ)
3. ชุดปลอกคันเร่ง 1 ข้าง
4. วงจรควบคุม (ออกแบบ และสร้างเองได้ เพราะใช้หลักการ PWM พื้นฐาน)
7. เครื่องชาท์จ (ประกอบ ออกแบบเอง อย่างง่าย)
หลังจากทดลองทำตอนแรก ใช้ Battery แค่ 2 ลูกคือ 24V แต่รู้สึกว่ายังไม่แรงพอจึงเพิ่มไปอีก 1 ลูกเป็น 36V พบว่า Motor ไม่ร้อนมากสามารถรับได้ จึงเพิ่ม Mosfet ในชุดควบคุมขนานไปอีก 2 ตัวเพื่อช่วยแบ่งเบากระแสที่ไหลมากขึ้น และสุดท้ายเปลี่ยน Bake หลังเป็น DumpBake แทน Bake ก้ามปู แบบเดิมเพื่อความปลอดภัยในการขับขี่ที่ดียิ่งขึ้น ปัจจุบันคันนี้ ยังคงเก็บอยู๋ จนถึงตราบนิรันดร์ เพราะเป็นคันครูประสิทธิภาพของจักรยานคันแรกหลังจากทดลองใช้งาน
- ทำความเร็วได้ถึง 40 กม/ชม
- รับน้ำหนักได้ 100-120 กก (2 คนซ้อน)
- วิ่งได้ระยะทางประมาณ 30-35 กม
สร้างเสร็จอะไรก็ดี เสีย 2 อย่างคือค่าของค่าอะไหล่เกือบ 7,000 บาท (ไม่รวมจักรยาน) และก็แลดูไม่ค่อยสวยงามนัก แต่ผมว่าก็เท่ดีนะ... ณ จุดนี้เองจึงเป็นที่มาของ ชุด Kit จักรยานไฟฟ้า ชุดนี้ซึ่งมีราคาไม่แพงจนเกินไปนัก รวมทั้งความเร็วและระยะทางที่ได้ก็ไม่สูงและต่ำจนเกินไป ฉะนั้นซื้อชุด Kit สำเร็จไปติดตั้งเองดีกว่าสะดวกกว่า ฟันธงครับ!!! แต่หากสนใจจะสร้างเองก็ไช่เรื่องยากอีกต่อไป ดาวโหลดแนวทางการคำนวณหาขนาดมอเตอร์จักรยานไฟฟ้า <- - - - - คลิ๊ก คลื๊ก
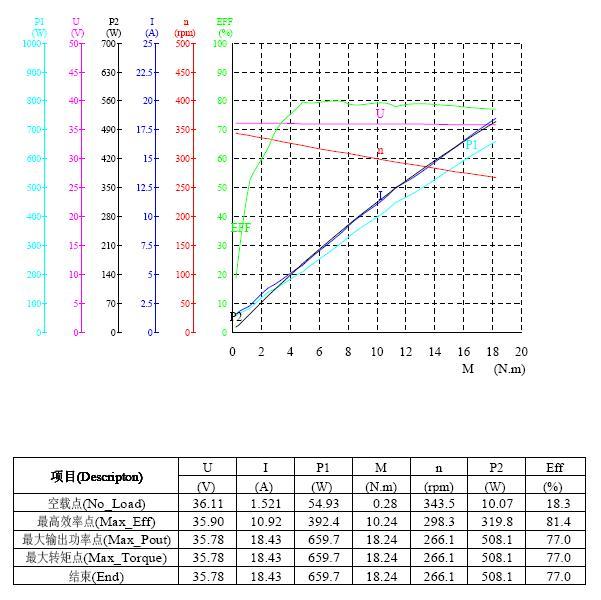
มาลองคำนวณหาความเร็วจาก Spec ของมอเตอร์และทดลองจริงกันดูดีกว่า จากข้อมูลและสเปคของ มอเตอร์ 24V250W สภาวะที่ Rate Load มีความเร็วรอบ 361 รอบ/นาที หากใช้ล้อขนาด 24" จะมีเส้นรอบวง เท่ากับ 75.36 นิ้วหรือ 1.914 เมตร และอัตราส่วนทดเกียร์มอเตอร์และฟรีสเตอจักรยาน 9:18 หรือ 1:2 (มอเตอร์หมุน 2 รอบ ล้อหมุน 1 รอบ) ฉะนั้นใน 1 นาที ล้อจะหมุนเท่ากับ 361/2 = 180.5 รอบ จะได้ระยะทาง 345.47 เมตร/นาที ในเวลา 1 ชั่วโมง รถจะวิ่งได้ระยะทางเท่ากับ 345.47 * 60 = 20,728.62 เมตร (20.728 กม/ชม ) *** หากต้องการ ความเร็ว ที่สูงขึ้นสำหรับรุ่น 24V250W นี้ วิธีง่ายๆ คือเปลี่ยนกล่องควบคุมเป็น 36V และเพิ่มแบตอนุกรมไปอีก 1 ลูกเป็น 36V จะทำให้รถมีความเร็วเพิ่มขึ้นอีก 50% หรือ 30กม/ชม เลยทีเดียว (แต่มอเตอร์จะมีเสียงที่ดังขึ้น และมีความร้อนเพิ่มขึ้นเล็กน้อย กระแสกินเพิ่มจาก 5A เป็น 7A ที่ความเร็วคงที่) คำนวณหาความเร็วสูงสุดของชุดติดตั้ง HF3635 จากข้อมูลและสเปคของ ฮับ มอเตอร์ 36V350W สภาวะที่ Rate Load มีความเร็วรอบ 266.1 รอบ/นาที หากใช้ล้อขนาด 24" จะมีเส้นรอบวง เท่ากับ 75.36 นิ้วหรือ 1.914 เมตร และอัตราส่วนมอเตอร์และล้อจักรยาน 1:1 (มอเตอร์หมุน 1 รอบ ล้อหมุน 1 รอบ) ฉะนั้นใน 1 นาที ล้อจะหมุนเท่ากับ 266.1 รอบ จะได้ระยะทาง 266.1 * 1.94 = 516.234 เมตร/นาที ในเวลา 1 ชั่วโมง รถจะวิ่งได้ระยะทางเท่ากับ 516.234 * 60 = 30,974.04 เมตร (30.97 กม/ชม ) *** หากต้องการความเร็ว ที่สูงขึ้นสำหรับรุ่น Hub 36V350W นี้ วิธีที่ง่ายสุด คือเพิ่มแบตอนุกรมไปอีก 1 ลูกเป็น 48V จะทำให้รถมีความเร็วเพิ่มขึ้นอีกประมาณ 33% หรือ 40กม/ชม จาก 30 กม/ชม เลยทีเดียว (จากการทดสอบ มีความร้อนที่กล่องควบคุมและมอเตอร์เพิ่มขึ้นเล็กน้อย โดยที่กระแสกินเพิ่มจาก 7A เป็น 9A ที่ความเร็วคงที่ แต่กล่องควบคุมต้องรองรับแรงดันที่เพิ่มขึ้นด้วย ซึ่งกล่องรุ่นหลังๆนี้ต้องเปลี่ยน C ภายในกล่อง 2 ตัว ( C Filter) เพื่อรองรับแรงดันที่เพิ่มขึ้น กล่าวคือ C ต้องทนแรงดันไม่น้อยกว่า 63V)
VIDEO ทดสอบความเร็วและอัตราการกินกระแส ชุดติดตั้งรุ่น MB2425R/L VIDEO ทดสอบความเร็วและอัตราการกินกระแส ชุดติดตั้งรุ่น HF3635
จักรยานไฟฟ้าคันแรกของผม ใช้มอเตอร์ 24V250W แต่ออกแบบชุดคอลโทรลเป็น 36V ทำให้ได้ความเร็วถึง 40กม / ชม มอเตอร์ไม่ร้อนด้วยทนดีจริงๆ คันนี้ใช้จักรยานทรงแม่บ้าน LA ประกอบกับชุดติดตั้ง MB2425R ความเร็ว 20 กมชม ความเร็วปานกลางไม่เร็วไม่ช้า ไว้ให้ลูกค้าทดลองขับขี่ คันนี้ใช้ Hub Motor 36V350W ทำความเร็ว 30 กม/ชม นิ่มนวล และเงียบ มอเตอร์แบบนี้ยังนิยมนำไปทำ "กังหันลมผลิตไฟฟ้า"
คันล่าสุด Hubmotor 48V1000W เมื่อใช้แบต "lifePO4 60V10AH " กับล้อขนาดมอเตอร์ไซด์ 17" ทำความเร็ว 53 กม/ชม. ระยะทาง 40กม.
อ่านแล้วชอบใจตามไปกด ถูกใจ เป็นกำลังใจให้ Admin กันได้นะครับ - - - - - > คลิ๊ก
หากท่านใดสนใจรายละเอียดหรือทำโปรเจค ยินดีให้คำปรึกษาได้ครับ ที่เบอร์ 084-1468656 (เอกชัย)







.gif)











.jpg)

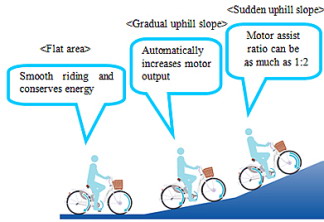
 เป็นพัลส์ตาม ตำแหน่งของแม่เหล็กที่หมุนมา ออกไปที่กล่องควบคุม (ขั้ว PAS ที่กล่อง) โดยความถี่ของสัญญาณที่ได้ก็จะแปรผันตามการปั่นเร็วช้า ของผู้ขับขี่ หากเราต้องการเร่งความเร็วเราก็จะปั่นเร็วขึ้น ส่งผลให้ สัญญาณไปเข้าที่ขั้ว PAS มีความถี่สูงขึ้นก็จะส่งผลให้กล่องควบคุมทำการจ่ายสัญญาณ PWM ให้กับมอเตอร์ที่กว้างขึ้น เพื่อให้มอเตอร์หมุนเร็ว ตอบสนองตามการปั่นของขาเราได้นั่นเอง แม้แต่ตอนเราขึ้นเนินหรือสะพานระบบนี้ก็จะช่วยตอบสนองเร็วช้าได้ตามแต่สถานการณ์ เช่นทางเรียบ ขึ้นเนินหรือสะพาน ทั้งนี้ทั้งนั้นระบบ PAS นี้ก็ไม่จำเป็นหากผู้ขับขี่ควบคุมการทำงานของมอเตอร์ ด้วยคันเร่งอยู่แล้วจะเร็วจะช้า หรือจะปั่นช่วยก็ขึ้นอยู่กับผู้ขับขี่จะควบคุมอยู่แล้วนั่นเอง...
เป็นพัลส์ตาม ตำแหน่งของแม่เหล็กที่หมุนมา ออกไปที่กล่องควบคุม (ขั้ว PAS ที่กล่อง) โดยความถี่ของสัญญาณที่ได้ก็จะแปรผันตามการปั่นเร็วช้า ของผู้ขับขี่ หากเราต้องการเร่งความเร็วเราก็จะปั่นเร็วขึ้น ส่งผลให้ สัญญาณไปเข้าที่ขั้ว PAS มีความถี่สูงขึ้นก็จะส่งผลให้กล่องควบคุมทำการจ่ายสัญญาณ PWM ให้กับมอเตอร์ที่กว้างขึ้น เพื่อให้มอเตอร์หมุนเร็ว ตอบสนองตามการปั่นของขาเราได้นั่นเอง แม้แต่ตอนเราขึ้นเนินหรือสะพานระบบนี้ก็จะช่วยตอบสนองเร็วช้าได้ตามแต่สถานการณ์ เช่นทางเรียบ ขึ้นเนินหรือสะพาน ทั้งนี้ทั้งนั้นระบบ PAS นี้ก็ไม่จำเป็นหากผู้ขับขี่ควบคุมการทำงานของมอเตอร์ ด้วยคันเร่งอยู่แล้วจะเร็วจะช้า หรือจะปั่นช่วยก็ขึ้นอยู่กับผู้ขับขี่จะควบคุมอยู่แล้วนั่นเอง... 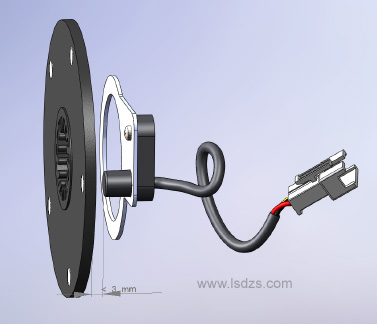
 1. Motor Gear 24VDC,250W 1 ตัว
1. Motor Gear 24VDC,250W 1 ตัว 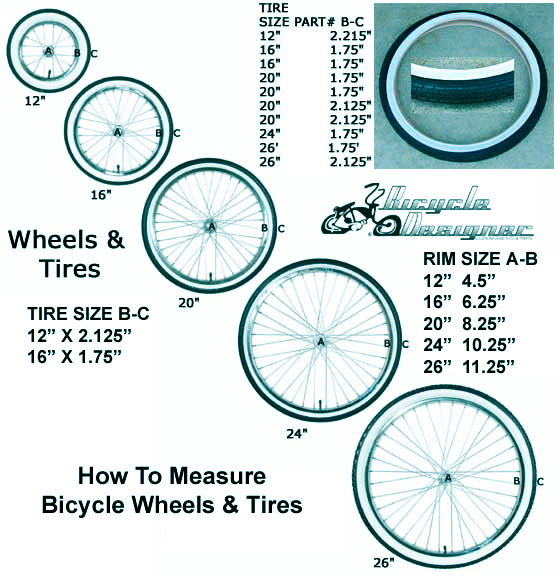 คำนวณหาความเร็วสูงสุดของชุดติดตั้ง MB2425R/L
คำนวณหาความเร็วสูงสุดของชุดติดตั้ง MB2425R/L






{kind=link}
{kind=link}